Anda mungkin juga menyukai
- Soal Fisika Semester 2 (FIX)Dokumen10 halamanSoal Fisika Semester 2 (FIX)DavidBelum ada peringkat
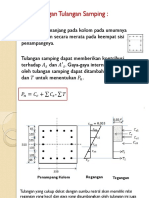
- Kuliah 3 - Kolom Dengan Tulangan SampingDokumen28 halamanKuliah 3 - Kolom Dengan Tulangan SampingNiken Silvia AnggraeniBelum ada peringkat
- Soal Benda TegarDokumen16 halamanSoal Benda TegarEsti Alif MBelum ada peringkat
- Bahan Soal FisikaDokumen30 halamanBahan Soal FisikaIntan Fitri CitangBelum ada peringkat
- Soal Dan Pembahasan Tentang Dinamika RotasiDokumen10 halamanSoal Dan Pembahasan Tentang Dinamika RotasiMaghfiratun Nisa YpBelum ada peringkat
- Soal Dan Pembahasan Tentang Dinamika RotasiDokumen10 halamanSoal Dan Pembahasan Tentang Dinamika Rotasimaghfiratun nisaBelum ada peringkat
- Dinaika RotasiDokumen34 halamanDinaika RotasiArifKurniantoBelum ada peringkat
- Momen Inersia, Energi KinetikDokumen10 halamanMomen Inersia, Energi KinetikElang TimurBelum ada peringkat
- Perhitungan Cakram TrolleyDokumen11 halamanPerhitungan Cakram TrolleyFajarBelum ada peringkat
- Sambungan Keling PDFDokumen27 halamanSambungan Keling PDFMaulana Fajar IbrahimBelum ada peringkat
- Solusi Quiz 18 Nov 2019 PDFDokumen4 halamanSolusi Quiz 18 Nov 2019 PDFjsmBelum ada peringkat
- Fisika Kelas 11 Dinamika Rotasi (Momen Gaya Dan Inersia) MuridDokumen29 halamanFisika Kelas 11 Dinamika Rotasi (Momen Gaya Dan Inersia) MuridMuhammad Azhar HadiBelum ada peringkat
- Balancing PDFDokumen32 halamanBalancing PDF999impactBelum ada peringkat
- DTM UI Balancing SP 17 PDFDokumen32 halamanDTM UI Balancing SP 17 PDF999impactBelum ada peringkat
- Bab 1 Kesetimbangan Dan Dinamika RotasiDokumen10 halamanBab 1 Kesetimbangan Dan Dinamika Rotasimuhammadsuprianto33Belum ada peringkat
- Rotasi Kesetimbangan Benda TegarDokumen30 halamanRotasi Kesetimbangan Benda TegarNana NurhidayahBelum ada peringkat
- Soal Pembahasan Dinamika RotasiDokumen4 halamanSoal Pembahasan Dinamika RotasiisnainiBelum ada peringkat
- Modul Din. RotDokumen12 halamanModul Din. RotManMan AR-llBelum ada peringkat
- Pembahasan Dinamika Rotasi & Keseimbangan Benda Tegar (Revisi)Dokumen5 halamanPembahasan Dinamika Rotasi & Keseimbangan Benda Tegar (Revisi)bekam sunnahBelum ada peringkat
- Minya Tugas FisikaDokumen18 halamanMinya Tugas FisikaAzhary IriawanBelum ada peringkat
- GhsDokumen35 halamanGhshendrik_prikitiewBelum ada peringkat
- Statika Diagram Gaya Geser Dan Momen LenturDokumen8 halamanStatika Diagram Gaya Geser Dan Momen LenturAzmil Azman StBelum ada peringkat
- Bab 3 Dan Bab 4Dokumen10 halamanBab 3 Dan Bab 4Dikdik DinulaqBelum ada peringkat
- G2 Tetapan PegasDokumen21 halamanG2 Tetapan PegasAnik El ZahraBelum ada peringkat
- Tugas GetaranDokumen13 halamanTugas GetaranYayan FunkBelum ada peringkat
- RumusDokumen10 halamanRumusHeru SupraptoBelum ada peringkat
- LP - M - Torsional Osilator - Ahmad Basyir NajwanDokumen8 halamanLP - M - Torsional Osilator - Ahmad Basyir NajwanFisika dalam Kehidupan Olimpiade FisikaBelum ada peringkat
- Dinamika RotasiDokumen34 halamanDinamika RotasiRamadhani Ika RahayuBelum ada peringkat
- Laporan - Fadila Rifani - 101320018 - Modul 4Dokumen12 halamanLaporan - Fadila Rifani - 101320018 - Modul 4Fadila RifaniBelum ada peringkat
- Tugas BajaDokumen28 halamanTugas BajastefannyBelum ada peringkat
- Uji PuntirDokumen7 halamanUji PuntirAditya PratamaBelum ada peringkat
- Kuliah 11 RotasiDokumen24 halamanKuliah 11 RotasiWulandariBelum ada peringkat
- Modul Dinamika RotasiDokumen17 halamanModul Dinamika Rotasilady jazzmineBelum ada peringkat
- Bab 1Dokumen7 halamanBab 1Fahril RFBelum ada peringkat
- Dinamika Rotasi Dan Kesetimbangan Benda TegarDokumen9 halamanDinamika Rotasi Dan Kesetimbangan Benda TegarrifkaBelum ada peringkat
- Mekanika 4Dokumen9 halamanMekanika 4SukoWibowoBelum ada peringkat
- Soal Keseimbangan Dan Dinamika RotasiDokumen6 halamanSoal Keseimbangan Dan Dinamika RotasiAnas IlhamBelum ada peringkat
- Bab 5. Kerja Dan EnergiDokumen30 halamanBab 5. Kerja Dan EnergiPeter StanleyBelum ada peringkat
- GerakDokumen15 halamanGerakBety ArifBelum ada peringkat
- PendulumDokumen12 halamanPendulumTony ChristiantoBelum ada peringkat
- Bab 6 Keseimbangan Benda TegarDokumen51 halamanBab 6 Keseimbangan Benda TegarBen Yudha SatriaBelum ada peringkat
- Lab 6 - Pengembangan Statik & Dinamik (Static & Dynamic Balancing)Dokumen20 halamanLab 6 - Pengembangan Statik & Dinamik (Static & Dynamic Balancing)Syahiran SalehBelum ada peringkat
- Dinamika Dan Kes - BendaDokumen36 halamanDinamika Dan Kes - BendaGunturBelum ada peringkat
- DINAMIKA RotasiDokumen4 halamanDINAMIKA RotasiTri Yos0% (1)
- Bab7 Sekrup DayaDokumen4 halamanBab7 Sekrup Dayagasing baokBelum ada peringkat
- Gaya Geser Dan Momen Lentur PDFDokumen18 halamanGaya Geser Dan Momen Lentur PDFChristian N Kariso100% (1)
- Gaya GeserDokumen18 halamanGaya GeserFais HamzahBelum ada peringkat
- Uts Beton 1 AriaDokumen6 halamanUts Beton 1 AriaDapid SukarnoBelum ada peringkat
- Favian Sheva K (181111012) - Load BalanceDokumen13 halamanFavian Sheva K (181111012) - Load BalanceFavian StevaBelum ada peringkat
- Soal Benda TegardocxDokumen16 halamanSoal Benda TegardocxblacknaitBelum ada peringkat
- Perhitungan Poros Transmisi - New EdtDokumen13 halamanPerhitungan Poros Transmisi - New EdtRaden Roy0% (1)
- Resume Fisika Dasar I-1Dokumen15 halamanResume Fisika Dasar I-1Diki ChenBelum ada peringkat
- Gamsin Teori 6Dokumen19 halamanGamsin Teori 6Gielbran Dewo CahyonoBelum ada peringkat
- Usbn PjokDokumen6 halamanUsbn Pjokandroid.kikiBelum ada peringkat
- TD Mod-03.Energi & Hukum PertamaDokumen14 halamanTD Mod-03.Energi & Hukum Pertamamuhammad ZailaniBelum ada peringkat
- Dinamika Teknik-5. MSN Torak Ganda Zoller.Dokumen14 halamanDinamika Teknik-5. MSN Torak Ganda Zoller.muhammad ZailaniBelum ada peringkat
- Adoc - Pub Perencanaan Jumlah Produksi Mie Instan Dengan PeneDokumen10 halamanAdoc - Pub Perencanaan Jumlah Produksi Mie Instan Dengan Penemuhammad ZailaniBelum ada peringkat
- 1027-Article Text-2234-1-10-20201025Dokumen4 halaman1027-Article Text-2234-1-10-20201025muhammad ZailaniBelum ada peringkat
- Latihan SBKDokumen10 halamanLatihan SBKmuhammad ZailaniBelum ada peringkat
- Pada Mulanya Ilmu Getaran Mekanis Digunakan Untuk Menganalisis Bunyi Yang Ditimbulkan Oleh Alat Musik (1) - 1Dokumen7 halamanPada Mulanya Ilmu Getaran Mekanis Digunakan Untuk Menganalisis Bunyi Yang Ditimbulkan Oleh Alat Musik (1) - 1muhammad ZailaniBelum ada peringkat
- Tugas Kuliah Ke 6Dokumen2 halamanTugas Kuliah Ke 6muhammad ZailaniBelum ada peringkat
- Pengaruh Perlakuan Panas Quenching Dan T E70d4cc2Dokumen11 halamanPengaruh Perlakuan Panas Quenching Dan T E70d4cc2Muhammad Zidan FauzanBelum ada peringkat
- Dinamika Teknik-5. MSN Torak Ganda Zoller.Dokumen14 halamanDinamika Teknik-5. MSN Torak Ganda Zoller.muhammad ZailaniBelum ada peringkat
- TransformasiDokumen5 halamanTransformasimuhammad ZailaniBelum ada peringkat
- Kajian Pustaka Bunyi (I)Dokumen24 halamanKajian Pustaka Bunyi (I)1214511029Belum ada peringkat
- Dinamika Teknik-4.Mekanisme Empat Penghubung.Dokumen10 halamanDinamika Teknik-4.Mekanisme Empat Penghubung.muhammad ZailaniBelum ada peringkat
- Pemilihan Bahan - Materi 1Dokumen7 halamanPemilihan Bahan - Materi 1muhammad ZailaniBelum ada peringkat
- Mekanika - MTRL 3Dokumen28 halamanMekanika - MTRL 3muhammad ZailaniBelum ada peringkat
- Bab IDokumen4 halamanBab Imuhammad ZailaniBelum ada peringkat
- Stoikemetri 1Dokumen2 halamanStoikemetri 1muhammad ZailaniBelum ada peringkat
- MKK11013 20201 ElektrokimiaDokumen6 halamanMKK11013 20201 Elektrokimiamuhammad ZailaniBelum ada peringkat
- MKK11013 20201 54101559Dokumen5 halamanMKK11013 20201 54101559Fay MaulanaBelum ada peringkat
- Agama Islam - Bab 10 - Peradaban Islam Masa Dahulu Dan SekarangDokumen9 halamanAgama Islam - Bab 10 - Peradaban Islam Masa Dahulu Dan Sekarangmuhammad ZailaniBelum ada peringkat
- Aljabar Linear Matriks EDWARDDokumen7 halamanAljabar Linear Matriks EDWARDmuhammad ZailaniBelum ada peringkat
- Agama Islam - Bab 9 - Islam, Ilmu Pengetahuan, Budaya Dan SeniDokumen7 halamanAgama Islam - Bab 9 - Islam, Ilmu Pengetahuan, Budaya Dan Senimuhammad ZailaniBelum ada peringkat
- Reaksi RedoksDokumen7 halamanReaksi Redoksmuhammad ZailaniBelum ada peringkat
- Stoikemetri 1Dokumen2 halamanStoikemetri 1muhammad ZailaniBelum ada peringkat
- Peubi 2Dokumen34 halamanPeubi 2muhammad ZailaniBelum ada peringkat
- Term Okimi ADokumen3 halamanTerm Okimi Amuhammad ZailaniBelum ada peringkat
- Bab 7 PDFDokumen28 halamanBab 7 PDFYunita ElisabethBelum ada peringkat
- TKK202813 20202 MateridanperubahannyaDokumen5 halamanTKK202813 20202 MateridanperubahannyaSeptari JakartaBelum ada peringkat
- Stoikimetri 2Dokumen4 halamanStoikimetri 2muhammad ZailaniBelum ada peringkat