Anda mungkin juga menyukai
- Ns = 1,200 rpm Nr = 1,140 rpm S = (1,200 - 1,140) / 1,200 = 60 / 1,200 = 0.05 = 5%Jadi peratusan slip pada motor ini ialah 5Dokumen63 halamanNs = 1,200 rpm Nr = 1,140 rpm S = (1,200 - 1,140) / 1,200 = 60 / 1,200 = 0.05 = 5%Jadi peratusan slip pada motor ini ialah 5Muhammad Fathil100% (1)
- TTL 2Dokumen97 halamanTTL 2fadjar_senseiBelum ada peringkat
- Mesin AsinkronDokumen12 halamanMesin AsinkronryoprayogaBelum ada peringkat
- ChevronDokumen124 halamanChevronAnang YogiBelum ada peringkat
- Motor 3 FasaDokumen20 halamanMotor 3 FasaMuh IbnuBelum ada peringkat
- MATERI 06 - Dasar-Dasar Motor ListrikDokumen17 halamanMATERI 06 - Dasar-Dasar Motor ListrikRenita Zulanda PutriBelum ada peringkat
- Konstruksi Motor ACDokumen10 halamanKonstruksi Motor ACSingo EdanBelum ada peringkat
- MOTOR LISTRIKDokumen48 halamanMOTOR LISTRIKIan SebriadiBelum ada peringkat
- 3 Motor Induksi Tiga Fase Rotor SangkarDokumen7 halaman3 Motor Induksi Tiga Fase Rotor SangkarAbilFIsmailBelum ada peringkat
- MOTOR ASINKRONDokumen36 halamanMOTOR ASINKRONbancet12Belum ada peringkat
- Final Tugas Bu ReniDokumen7 halamanFinal Tugas Bu ReniDeep ChannelBelum ada peringkat
- Motor Induksi dan Sinkron: Perbandingan Prinsip Kerja dan AplikasiDokumen16 halamanMotor Induksi dan Sinkron: Perbandingan Prinsip Kerja dan AplikasiAnonymous 0y6836BFDxBelum ada peringkat
- 11Dokumen8 halaman11ospf12Belum ada peringkat
- Kelompok 1 DEFINISI MOTOR LISTRIK DAN PENGAPLIKASIANNYA 1Dokumen22 halamanKelompok 1 DEFINISI MOTOR LISTRIK DAN PENGAPLIKASIANNYA 1hamidBelum ada peringkat
- Motor ACDokumen4 halamanMotor ACNur InayahBelum ada peringkat
- Motor Listrik Di KapalDokumen26 halamanMotor Listrik Di KapalbbwinarBelum ada peringkat
- Paper Induction MotorDokumen9 halamanPaper Induction MotorArizka Miftah FaridlBelum ada peringkat
- Calvina Izumi Ramadhan - 1911012013 - Motor ACDokumen5 halamanCalvina Izumi Ramadhan - 1911012013 - Motor ACCalvinaizumi RamadhanBelum ada peringkat
- Motor Listrik 1 FasaDokumen11 halamanMotor Listrik 1 FasaadimaliknegoroBelum ada peringkat
- Mesin AcDokumen35 halamanMesin AcFauzaan AjiBelum ada peringkat
- Motor Induksi 1 PhaseDokumen54 halamanMotor Induksi 1 Phasemhafidz49Belum ada peringkat
- Pertemuan 8 Dan 9 - Mesin SinkronDokumen27 halamanPertemuan 8 Dan 9 - Mesin SinkronJajang SBelum ada peringkat
- ACC PMML P4 Nia AnggrainiDokumen44 halamanACC PMML P4 Nia AnggrainiHauzaan KalimatullahBelum ada peringkat
- RewindingDokumen13 halamanRewindingDeva GilasBelum ada peringkat
- Laporan Praktikum Motor 1 Fasa Adit SsDokumen10 halamanLaporan Praktikum Motor 1 Fasa Adit SsRizki Agung WicaksonoBelum ada peringkat
- Motor ListrikDokumen29 halamanMotor Listrikyosri uncuBelum ada peringkat
- OPTIMASI TRANSFORMATORDokumen31 halamanOPTIMASI TRANSFORMATORDewi SetiyoBelum ada peringkat
- Motor InduksiDokumen5 halamanMotor InduksiYhendris ArifeibeBelum ada peringkat
- MME Modul 5 Mesin Induksi - RevisiDokumen8 halamanMME Modul 5 Mesin Induksi - RevisiNafis Salman BrahmantinoBelum ada peringkat
- ACC SEMENTARA - PUTRI WULANDARI - Kelompok9 - Prak 4 PMML 2022Dokumen47 halamanACC SEMENTARA - PUTRI WULANDARI - Kelompok9 - Prak 4 PMML 2022Putri WulandariBelum ada peringkat
- Motor Listrik BaruDokumen29 halamanMotor Listrik BaruKerin BerlianaBelum ada peringkat
- Ringkasan Motor AcDokumen10 halamanRingkasan Motor AcFransisca wanganiaBelum ada peringkat
- MOTOR INDUKSIDokumen10 halamanMOTOR INDUKSIMuhamad NafianBelum ada peringkat
- Karakteristik Motor ACDokumen5 halamanKarakteristik Motor AClink starterBelum ada peringkat
- Motor Induksi 1 Fasa-1Dokumen11 halamanMotor Induksi 1 Fasa-1seliyuliBelum ada peringkat
- Motor Ac SinkronDokumen19 halamanMotor Ac SinkronAma't AmronBelum ada peringkat
- Motor Listrik Ac PDFDokumen3 halamanMotor Listrik Ac PDFanggara08Belum ada peringkat
- Modul 11 Dasar Konversi Energi ListrikDokumen8 halamanModul 11 Dasar Konversi Energi ListrikRahmat Nur IlhamBelum ada peringkat
- 10-Motor Induksi 1 FasaDokumen29 halaman10-Motor Induksi 1 FasaMuhammad Harris MunandarBelum ada peringkat
- Motor AcDokumen3 halamanMotor Acajeng andianiBelum ada peringkat
- MOTOR AC DASARDokumen11 halamanMOTOR AC DASARAndi Mannapaki NatsirBelum ada peringkat
- P4 Wound Rotor 3-Phase Induction MotorDokumen31 halamanP4 Wound Rotor 3-Phase Induction MotorMochamad Fiqih Afifuddin FBelum ada peringkat
- Generator Ac Motor Ac Dan TransformatorDokumen8 halamanGenerator Ac Motor Ac Dan Transformatormas teBelum ada peringkat
- Motor AcDokumen11 halamanMotor AcMuhammad SahlanBelum ada peringkat
- Motor SinkronDokumen19 halamanMotor SinkronAvie AnsoriBelum ada peringkat
- Pra UAS - 44218012Dokumen5 halamanPra UAS - 44218012AAE IndustryBelum ada peringkat
- MOTOR INDUKSIDokumen57 halamanMOTOR INDUKSIGede AdityaBelum ada peringkat
- MEMPERSIAPKAN MOTORDokumen32 halamanMEMPERSIAPKAN MOTORyunanBelum ada peringkat
- Jobsheet 1 Medan Putar, Arah Putar, Slip MotorDokumen10 halamanJobsheet 1 Medan Putar, Arah Putar, Slip Motorridho riski hadiBelum ada peringkat
- Motor Asincron 1 FasaDokumen21 halamanMotor Asincron 1 FasaGanjar WibawaBelum ada peringkat
- MOTOR INDUKSIDokumen6 halamanMOTOR INDUKSIVioletta DiyandaBelum ada peringkat
- Jobsheet Praktek Mesin Listrik OkDokumen32 halamanJobsheet Praktek Mesin Listrik OkFajar Muhammad100% (1)
- MotlisDokumen8 halamanMotlisAnonymous D9Vo0uNfTFBelum ada peringkat
- Sistem Starting Motor Dengan Liquid RotorDokumen35 halamanSistem Starting Motor Dengan Liquid RotorFahmiMuhammadRifai100% (9)
- MOTOR ACDokumen9 halamanMOTOR ACElang KevinBelum ada peringkat
- SOSIALISASI DAN PEMBEKALAN MAGANG fixDokumen12 halamanSOSIALISASI DAN PEMBEKALAN MAGANG fixSuwandi RamdanBelum ada peringkat
- Modul 3 - PemogramanDokumen140 halamanModul 3 - PemogramanSuwandi RamdanBelum ada peringkat
- Pengantar Dasar HydropowerDokumen28 halamanPengantar Dasar HydropowerSuwandi RamdanBelum ada peringkat
- SOAL - Tugas MandiriDokumen1 halamanSOAL - Tugas MandiriSuwandi RamdanBelum ada peringkat
- Modul 2 - Sistem Koordinat Dan Alat PotongDokumen30 halamanModul 2 - Sistem Koordinat Dan Alat PotongSuwandi RamdanBelum ada peringkat
- MESIN FRAIS CNCDokumen51 halamanMESIN FRAIS CNCSuwandi RamdanBelum ada peringkat
- Kelompok 5 KewirausahaanDokumen16 halamanKelompok 5 KewirausahaanSuwandi RamdanBelum ada peringkat
- Blue Minimalist Business Model Canvas BrainstormDokumen1 halamanBlue Minimalist Business Model Canvas BrainstormSuwandi RamdanBelum ada peringkat
- KONTRAK KERJADokumen5 halamanKONTRAK KERJASuwandi RamdanBelum ada peringkat
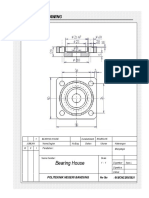
- Operation Drawing: Bearing HouseDokumen10 halamanOperation Drawing: Bearing HouseSuwandi RamdanBelum ada peringkat
- Menghitung Berat dan Sudut Disk PorosDokumen5 halamanMenghitung Berat dan Sudut Disk PorosSuwandi RamdanBelum ada peringkat
- Modul 3 Pengerollan SSDokumen29 halamanModul 3 Pengerollan SSSuwandi RamdanBelum ada peringkat
- MOTOR INDUKSIDokumen106 halamanMOTOR INDUKSISuwandi RamdanBelum ada peringkat
- Sistem Kelistrikan Dan Kendali ListrikDokumen32 halamanSistem Kelistrikan Dan Kendali ListrikSuwandi RamdanBelum ada peringkat
- LatihanDokumen18 halamanLatihanAhmadBelum ada peringkat
- Asignment-1 Line ConstructionDokumen1 halamanAsignment-1 Line ConstructionSuwandi RamdanBelum ada peringkat
- Kindin BDokumen1 halamanKindin BSuwandi RamdanBelum ada peringkat
- Asignment-1 Line ConstructionDokumen1 halamanAsignment-1 Line ConstructionSuwandi RamdanBelum ada peringkat
- Kelompok 4:: (Working Plan)Dokumen3 halamanKelompok 4:: (Working Plan)Suwandi RamdanBelum ada peringkat
- Modul 1. Pengantar PLCDokumen22 halamanModul 1. Pengantar PLCSuwandi RamdanBelum ada peringkat
- Kaca dalam ArsitekturDokumen13 halamanKaca dalam ArsitekturDimas NagaBelum ada peringkat
- (PPT) Materi 6. Proses Gerinda (Grinding)Dokumen27 halaman(PPT) Materi 6. Proses Gerinda (Grinding)Rahardian Faizal ZuhdiBelum ada peringkat
- Soal Latihan UtsDokumen1 halamanSoal Latihan UtsSuwandi RamdanBelum ada peringkat
- Tag 5 OrangDokumen1 halamanTag 5 OrangSuwandi RamdanBelum ada peringkat
- Dasar Pemrograman Untuk Mesin Bubut CNC Dengan GSK 928 TE-Rev1 - 2Dokumen38 halamanDasar Pemrograman Untuk Mesin Bubut CNC Dengan GSK 928 TE-Rev1 - 2Rendi Prisma Wahyudi100% (1)
- Soal Latihan UtsDokumen1 halamanSoal Latihan UtsSuwandi RamdanBelum ada peringkat