Anda mungkin juga menyukai
- Sistem Komunikasi DcsDokumen43 halamanSistem Komunikasi Dcseman71100% (2)
- 01 - Siti Sofiya - 02311745000018 - P3Dokumen48 halaman01 - Siti Sofiya - 02311745000018 - P3siti sofiyaBelum ada peringkat
- 12 - P3 - Fitriani Diniyah - 02311540000113 PDFDokumen52 halaman12 - P3 - Fitriani Diniyah - 02311540000113 PDFTriaBelum ada peringkat
- Laporan Kerja PraktekBentukDokumen50 halamanLaporan Kerja PraktekBentukDevita RachmatBelum ada peringkat
- KP RappDokumen65 halamanKP RappAndre PratamaBelum ada peringkat
- Konfigurasi Integrasi PLC, DCS Dan Control ValveDokumen7 halamanKonfigurasi Integrasi PLC, DCS Dan Control ValveAmriHidayantoLaksonoBelum ada peringkat
- LKTI OLIVIA 2022-Institut Teknologi Sepuluh Nopember-Bunga Diva CamillaDokumen35 halamanLKTI OLIVIA 2022-Institut Teknologi Sepuluh Nopember-Bunga Diva CamillaBunga DivaBelum ada peringkat
- Laporan Kerja Praktek RU VDokumen74 halamanLaporan Kerja Praktek RU VTONNIBelum ada peringkat
- Proposal KPDokumen6 halamanProposal KPirpansahBelum ada peringkat
- Laporan Scada 1Dokumen3 halamanLaporan Scada 1septianBelum ada peringkat
- Dasar PIDDokumen13 halamanDasar PIDBambang HerlambangBelum ada peringkat
- Proposal Pertamina Rewulu YogyakartaDokumen12 halamanProposal Pertamina Rewulu YogyakartaSarjitoBelum ada peringkat
- Rancang Bangun Human Machine Interface (HMI) Wonderware in TouchDokumen27 halamanRancang Bangun Human Machine Interface (HMI) Wonderware in TouchArdian SyahBelum ada peringkat
- Materi Kuliah DCSDokumen34 halamanMateri Kuliah DCSNegoro Setyo86% (7)
- Modul Praktikum DCS - Engineering PDFDokumen37 halamanModul Praktikum DCS - Engineering PDFAf ThonBelum ada peringkat
- Makalah FieldDokumen14 halamanMakalah FieldSam Smith100% (1)
- Laporan Pdam MiniDokumen9 halamanLaporan Pdam Minibudi setiawanBelum ada peringkat
- Cara Memahami Piping Instrument DiagramDokumen5 halamanCara Memahami Piping Instrument DiagramAhmad Dzulfiqar Rahman100% (1)
- Laporan Kerja PraktekDokumen62 halamanLaporan Kerja PraktekBramantyo Krisdito AdiBelum ada peringkat
- Proposal Tugas Akhir Berel (Fuzzy-Pid) (Revisi 3) Fix1Dokumen19 halamanProposal Tugas Akhir Berel (Fuzzy-Pid) (Revisi 3) Fix1Mohammad Berel TorikiBelum ada peringkat
- Embedded (Tugas 3)Dokumen11 halamanEmbedded (Tugas 3)Bella mitaya SariBelum ada peringkat
- Laporan PKL PT. Semen TonasaDokumen114 halamanLaporan PKL PT. Semen TonasasalfiayunusBelum ada peringkat
- Sistem Kontrol JurnalDokumen8 halamanSistem Kontrol JurnalGhifari Nur ArdiansyahBelum ada peringkat
- Donald Q. Kern - Process Heat TransferDokumen78 halamanDonald Q. Kern - Process Heat TransferNur Rahmi KeliatBelum ada peringkat
- Kontrol InstrumentDokumen3 halamanKontrol InstrumentPamungkas DimasBelum ada peringkat
- Module PLC Programming PDFDokumen60 halamanModule PLC Programming PDFSaipul IdayBelum ada peringkat
- Proposal Tugas Akhir AbroriDokumen18 halamanProposal Tugas Akhir AbroriFerdi HilmiBelum ada peringkat
- Laporan KP Di PT - CFKDokumen22 halamanLaporan KP Di PT - CFKDennius AritonangBelum ada peringkat
- PPT Scada Dcs HmiDokumen27 halamanPPT Scada Dcs HmidepantaspenBelum ada peringkat
- Scada Vs PLC Vs DCS Vs InstrumentDokumen12 halamanScada Vs PLC Vs DCS Vs InstrumentRafif NofanBelum ada peringkat
- Instrumentation Symbols and Nomenclature (P&i Diagram)Dokumen17 halamanInstrumentation Symbols and Nomenclature (P&i Diagram)Siti SofariyahBelum ada peringkat
- CX-Designer Lampu Penyebrangan Dan KonveyorDokumen12 halamanCX-Designer Lampu Penyebrangan Dan KonveyorRangga SuryaBelum ada peringkat
- Laporan Kerja Praktek (Eras)Dokumen36 halamanLaporan Kerja Praktek (Eras)Erasmus Nugraha KristiBelum ada peringkat
- Foundation Field Bus Project Implementation (In Bahasa Indonesia)Dokumen86 halamanFoundation Field Bus Project Implementation (In Bahasa Indonesia)iwankptb71100% (3)
- Komunikasi PLC Ke DCSDokumen9 halamanKomunikasi PLC Ke DCSMatematika Ceria100% (1)
- Kerja Praktek PLTU JPRDokumen10 halamanKerja Praktek PLTU JPRRiga BagasBelum ada peringkat
- HP Bypass Unit 1-4Dokumen11 halamanHP Bypass Unit 1-4IlhamIlahiyaSariatmadja100% (1)
- Laporan Mikro 5Dokumen7 halamanLaporan Mikro 5PRAMUDYA RAKHMADYANSYAH SOFYANBelum ada peringkat
- Modul ScadaDokumen49 halamanModul ScadaBayu RamadhanBelum ada peringkat
- Laporan Pkl-Laily ShahadatiDokumen87 halamanLaporan Pkl-Laily ShahadatiDavid Bayu WinarkoBelum ada peringkat
- Laporan Fiks Revisi12Dokumen73 halamanLaporan Fiks Revisi12Redo febrianBelum ada peringkat
- Silabus Staff LaboratoriumDokumen2 halamanSilabus Staff Laboratoriumrida sari juli antiBelum ada peringkat
- On Line (Dol) Dan Variabel Speed Drive (VSD) PadaDokumen6 halamanOn Line (Dol) Dan Variabel Speed Drive (VSD) Padamuhammad wafiBelum ada peringkat
- MP13 Pemeliharaan Kontrol Proteksi Dan InstrumenDokumen125 halamanMP13 Pemeliharaan Kontrol Proteksi Dan InstrumenEkky Meidy DwiatnaBelum ada peringkat
- 1Dokumen2 halaman1Anzar Maulana100% (1)
- Compressor Surging Anti Surge ControlDokumen13 halamanCompressor Surging Anti Surge ControlElton SitumeangBelum ada peringkat
- Analisis Mesin Dust Collector Untuk Meminimalisir Terjadinya Break Down Agar Tidak Mengganggu Proses ProduksiDokumen10 halamanAnalisis Mesin Dust Collector Untuk Meminimalisir Terjadinya Break Down Agar Tidak Mengganggu Proses ProduksiSyahrulBelum ada peringkat
- KP PetrokimiaDokumen69 halamanKP PetrokimiaAgung Podo Moro100% (2)
- PKL II MuhklisinDokumen131 halamanPKL II MuhklisindimasBelum ada peringkat
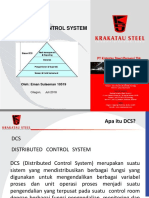
- Distributed Control SystemDokumen7 halamanDistributed Control SystemCindy Afliani SiregarBelum ada peringkat
- Proposal Kerja Praktek PLCDokumen8 halamanProposal Kerja Praktek PLCDhewa DeXterBelum ada peringkat
- Kalibrasi DP TransmitterDokumen7 halamanKalibrasi DP Transmittersapu11jagat5855Belum ada peringkat
- BAB 1 MAGANG 2 Mikha 017Dokumen36 halamanBAB 1 MAGANG 2 Mikha 017Izma Amc Comunity100% (1)
- Proposal Tugas AkhirDokumen13 halamanProposal Tugas AkhirYori Milzam Umar100% (1)
- Lapres P3 - Filza Adha Adelina - 02311540000057Dokumen48 halamanLapres P3 - Filza Adha Adelina - 02311540000057Filza Ad'ha AdelinaBelum ada peringkat
- Distributed Control SystemDokumen35 halamanDistributed Control SystemAddinul HakimBelum ada peringkat
- P3 - M. Rizal Rizki Hansyah - 02311745000023Dokumen41 halamanP3 - M. Rizal Rizki Hansyah - 02311745000023RizalBelum ada peringkat
- Modul Praktikum Simulasi Komputer 2022Dokumen71 halamanModul Praktikum Simulasi Komputer 2022Ahmad BuchoriBelum ada peringkat
- Laporan Resmi P2 Praktikum SPO EmhaDokumen35 halamanLaporan Resmi P2 Praktikum SPO EmhaIlham AmirulBelum ada peringkat
- Laporan Resmi SPO P2 Kel 18Dokumen55 halamanLaporan Resmi SPO P2 Kel 18Luqi Rf BoltzmannBelum ada peringkat
- BlogspotDokumen2 halamanBlogspotIlham AmirulBelum ada peringkat
- Tugas Individu Hari Ke 3 - Ilham Amirul AkbarDokumen1 halamanTugas Individu Hari Ke 3 - Ilham Amirul AkbarIlham AmirulBelum ada peringkat
- Pengertian BlogspotDokumen2 halamanPengertian BlogspotIlham AmirulBelum ada peringkat
- Blogspot WikipediaDokumen4 halamanBlogspot WikipediaIlham AmirulBelum ada peringkat
- Blogspot Vs WordpressDokumen23 halamanBlogspot Vs WordpressIlham AmirulBelum ada peringkat
- TUGAS INDIVIDU LATSAR Hari Ke 2 - Ilham Amirul AkbarDokumen2 halamanTUGAS INDIVIDU LATSAR Hari Ke 2 - Ilham Amirul AkbarIlham AmirulBelum ada peringkat
- Persyaratan Umum Pendaftaran Program Tapera (PUPPT) PesertaDokumen6 halamanPersyaratan Umum Pendaftaran Program Tapera (PUPPT) Pesertafauzi_darmaBelum ada peringkat
- Hand Out KPDokumen7 halamanHand Out KPIlham AmirulBelum ada peringkat
- Rancangan Aktualisasi Ilham Amirul AkbarDokumen39 halamanRancangan Aktualisasi Ilham Amirul AkbarIlham AmirulBelum ada peringkat
- Undang Undang No. 5 Tahun 2014 Tentang Aparatur Sipil NegaraDokumen105 halamanUndang Undang No. 5 Tahun 2014 Tentang Aparatur Sipil NegaraTris Neo Setiawan67% (3)
- Laporan Kerja Praktek FixDokumen113 halamanLaporan Kerja Praktek FixIlham AmirulBelum ada peringkat
- Sistem FotonDokumen2 halamanSistem FotonIlham AmirulBelum ada peringkat
- Abstrak Jurnal 1Dokumen1 halamanAbstrak Jurnal 1Ilham AmirulBelum ada peringkat
- Laporan PiezoelektrikDokumen14 halamanLaporan PiezoelektrikyuniaBelum ada peringkat
- P3 2413100065 Dwi Mardika Lapres SementaraDokumen38 halamanP3 2413100065 Dwi Mardika Lapres SementaraIlham AmirulBelum ada peringkat
- Ilham Amirul Tugas VentilasiDokumen2 halamanIlham Amirul Tugas VentilasiIlham AmirulBelum ada peringkat
- Laporan Resmi P2 Praktikum SPO EmhaDokumen35 halamanLaporan Resmi P2 Praktikum SPO EmhaIlham AmirulBelum ada peringkat
- Laporan KP ProgressDokumen15 halamanLaporan KP ProgressIlham AmirulBelum ada peringkat
- Tugas DIDokumen4 halamanTugas DIIlham AmirulBelum ada peringkat
- Daftar PustakaDokumen1 halamanDaftar PustakaIlham AmirulBelum ada peringkat
- Fungsi KeanggotaanDokumen7 halamanFungsi KeanggotaanIlham AmirulBelum ada peringkat
- Soal Latihan FisbangDokumen1 halamanSoal Latihan FisbangIlham AmirulBelum ada peringkat
- Laporan Resmi SPO P2 Ilham Amirul AkbarDokumen36 halamanLaporan Resmi SPO P2 Ilham Amirul AkbarIlham AmirulBelum ada peringkat
- Ilham Amirul - Tugas Fisbang UASDokumen4 halamanIlham Amirul - Tugas Fisbang UASIlham AmirulBelum ada peringkat
- Ilham Amirul Tugas VentilasiDokumen2 halamanIlham Amirul Tugas VentilasiIlham AmirulBelum ada peringkat
- Tugas Asiskom (33237, 33529)Dokumen18 halamanTugas Asiskom (33237, 33529)nanda_gen7Belum ada peringkat
- Bab 2 Medan Listrik BaruDokumen34 halamanBab 2 Medan Listrik BaruSeptian Citra KusumaBelum ada peringkat
- Modul Teori LampuDokumen13 halamanModul Teori Lampucybercruzz75% (8)
- Bhinjmo,,lDokumen8 halamanBhinjmo,,lIlham AmirulBelum ada peringkat