Anda mungkin juga menyukai
- 1 Labsheet JoystickDokumen13 halaman1 Labsheet JoystickRizky SyarifBelum ada peringkat
- Pid ControllerDokumen10 halamanPid ControllerIklas FadilBelum ada peringkat
- Disain PID Dengan Menggunakan MatlabDokumen8 halamanDisain PID Dengan Menggunakan MatlabTaufik Hidayat SoiBelum ada peringkat
- Adt2107 - Laporan Parameter Elemen Proporsional 1Dokumen14 halamanAdt2107 - Laporan Parameter Elemen Proporsional 1Muhammad Zikri Abdillah100% (1)
- Modul 4 SCADADokumen11 halamanModul 4 SCADARyan SinagaBelum ada peringkat
- Dasar Dasar MekatronikaDokumen15 halamanDasar Dasar MekatronikaJunion GultomBelum ada peringkat
- Aplikasi Pengunaan Sensor Cahaya Dalam Kehidupan SehariDokumen1 halamanAplikasi Pengunaan Sensor Cahaya Dalam Kehidupan SehariRazorBelum ada peringkat
- Laporan 1 PLCDokumen7 halamanLaporan 1 PLCrefanr3dBelum ada peringkat
- Single Acting CylinderDokumen11 halamanSingle Acting CylinderArvian ArtvianBelum ada peringkat
- Trainer PLC Yang Digunakan Adalah Type SR3B261BD Terdiriatas 10 Buah Input DiskritDokumen6 halamanTrainer PLC Yang Digunakan Adalah Type SR3B261BD Terdiriatas 10 Buah Input DiskritirfanrifkyBelum ada peringkat
- Modul 1 Elektronika IndustriDokumen17 halamanModul 1 Elektronika IndustriAlfi SyahrinBelum ada peringkat
- Laporan Praktikum MikrokontrollerDokumen23 halamanLaporan Praktikum Mikrokontrollerriana dwiBelum ada peringkat
- Instruksi Difu DifdDokumen5 halamanInstruksi Difu Difdnaura tsabitaBelum ada peringkat
- Sistem Pengecatan Otomatis Bekerja Menyemprotkan Dua Warna Dasar Ke Sebuah Objek Untuk Mendapatkan Suatu Campuran Warna TertentuDokumen1 halamanSistem Pengecatan Otomatis Bekerja Menyemprotkan Dua Warna Dasar Ke Sebuah Objek Untuk Mendapatkan Suatu Campuran Warna TertentuMoch IkhlasBelum ada peringkat
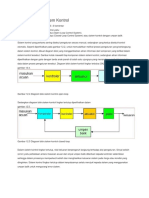
- Diagram Blok Sistem KontrolDokumen5 halamanDiagram Blok Sistem KontrolFadil Rizki MBelum ada peringkat
- PENGATURAN MOTOR DCDokumen11 halamanPENGATURAN MOTOR DCDonny MuckteeBelum ada peringkat
- Arduino Dan MatlabDokumen6 halamanArduino Dan MatlabFadlia Agries100% (1)
- 3305 6814 1 SM PDFDokumen6 halaman3305 6814 1 SM PDFHeber Prima Anjuau PBelum ada peringkat
- PANDUAN-Modul-Mikrokontroler Atmega 16 PDFDokumen59 halamanPANDUAN-Modul-Mikrokontroler Atmega 16 PDFFerry SatriawanBelum ada peringkat
- Laporan Coffee Mix Pratikum PLC 2 Yuni Andriva Putri 20130069Dokumen8 halamanLaporan Coffee Mix Pratikum PLC 2 Yuni Andriva Putri 20130069Vandy DpBelum ada peringkat
- Rancangan Kendali Lampu Menggunakan Mikrokontroller ATMega328 Berbasis Sensor GetarDokumen8 halamanRancangan Kendali Lampu Menggunakan Mikrokontroller ATMega328 Berbasis Sensor GetarmuhalifputraBelum ada peringkat
- Percobaan 10Dokumen12 halamanPercobaan 10AlifadinugrohoBelum ada peringkat
- Laporan Analog ComparatorDokumen10 halamanLaporan Analog ComparatorOghi Hendra100% (1)
- MONITORING ATS-AMF BERBASIS IOTDokumen56 halamanMONITORING ATS-AMF BERBASIS IOTFarenndra Adhi100% (1)
- Job 7 10 11Dokumen27 halamanJob 7 10 11YudhaBelum ada peringkat
- KENDALI PID MOTOR DCDokumen9 halamanKENDALI PID MOTOR DCBilly Rian SiregarBelum ada peringkat
- Pengontrolan Level Air Pada TandonDokumen7 halamanPengontrolan Level Air Pada TandonElga TheofaniBelum ada peringkat
- Laporan Rugi TeganganDokumen18 halamanLaporan Rugi Teganganjuliana nurmalaBelum ada peringkat
- Garis Tunggal (Single Line)Dokumen3 halamanGaris Tunggal (Single Line)suci ayu lestariBelum ada peringkat
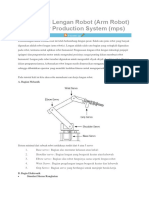
- Memahami Lengan RobotDokumen11 halamanMemahami Lengan RobotRikoHarsoyoBelum ada peringkat
- Jurnal Mekatronika Riky Fitriadi Nim - 23213061Dokumen5 halamanJurnal Mekatronika Riky Fitriadi Nim - 23213061Riky Fitriadi100% (1)
- Bab Vii Sistem Dengan Umpan Balik Dan KestabilanDokumen7 halamanBab Vii Sistem Dengan Umpan Balik Dan KestabilanBondan TristantyoBelum ada peringkat
- POSK03 M0520044 Latifah HukmaDokumen21 halamanPOSK03 M0520044 Latifah HukmaLatifah Hukma ShobiyyaBelum ada peringkat
- ELIMINASIDokumen17 halamanELIMINASIM Erizky SyaputraBelum ada peringkat
- Sensor MateriDokumen10 halamanSensor MateriAira WongBelum ada peringkat
- Sensor dan Tranduser Jenis dan Prinsip KerjaDokumen2 halamanSensor dan Tranduser Jenis dan Prinsip KerjaAfina ApriliaBelum ada peringkat
- Makalah Elektronika Dasar - Auto Fan With LM335Dokumen40 halamanMakalah Elektronika Dasar - Auto Fan With LM335Iam HidayatBelum ada peringkat
- 01 GustiPutuHaristyadi 13117020 EL3106 FakhrurRoziDokumen7 halaman01 GustiPutuHaristyadi 13117020 EL3106 FakhrurRoziGus HarisBelum ada peringkat
- Kontroler Proporsional Untuk Motor Servo PDFDokumen5 halamanKontroler Proporsional Untuk Motor Servo PDFAmrie AbenqBelum ada peringkat
- Kumpulan Sensor AnalogDokumen18 halamanKumpulan Sensor AnalogTresna Aglis SalawasnaBelum ada peringkat
- Makalah Interface Serial Rs-485 RevisiDokumen11 halamanMakalah Interface Serial Rs-485 RevisiSilver Guner100% (1)
- Ayo BelajarDokumen17 halamanAyo BelajarMery Chumayroh100% (1)
- Tuning Kontroler PIDDokumen9 halamanTuning Kontroler PIDchoiozaBelum ada peringkat
- Perancangan FSM untuk Lampu LEDDokumen35 halamanPerancangan FSM untuk Lampu LEDwira narendraBelum ada peringkat
- Laporan Ic DigitalDokumen24 halamanLaporan Ic DigitalArul NugrahaBelum ada peringkat
- ROBOT QUADRUPED SPIDERDokumen12 halamanROBOT QUADRUPED SPIDERM Fadil Ramadhan Pratama0% (1)
- Modul 7 Praktikum Sistem Kendali DigitalDokumen22 halamanModul 7 Praktikum Sistem Kendali DigitalMiftakhul HudaBelum ada peringkat
- Instrumentasi OptikDokumen23 halamanInstrumentasi OptikVivaldi Khathami100% (1)
- Rancang Bangun Simulator Sequential Process ControlDokumen13 halamanRancang Bangun Simulator Sequential Process ControlAyik Achmad Muaiyat0% (1)
- DETEKSI BAHAN SENARDokumen13 halamanDETEKSI BAHAN SENARAryo PradikdoBelum ada peringkat
- Lab ViewDokumen41 halamanLab ViewIwan Ruhiyana100% (2)
- MODUL4Dokumen6 halamanMODUL4Дккнц-їшдй-ѕдйб-Раибегаи Тне-Маѕтег'Тнчмв- Ғдсєвоок.сѻмBelum ada peringkat
- SistemKontrolOtomatisDokumen45 halamanSistemKontrolOtomatisWulan Mokodongan100% (2)
- Simulasi Pengaturan Dan Pendeteksi Kecepatan Motor DC Dengan Potensiometer Dan EncoderDokumen9 halamanSimulasi Pengaturan Dan Pendeteksi Kecepatan Motor DC Dengan Potensiometer Dan EncoderArief MailBelum ada peringkat
- Ciri Dan Karakteristik SensorDokumen12 halamanCiri Dan Karakteristik SensorfadillahBelum ada peringkat
- Summing AmplifierDokumen5 halamanSumming Amplifier1C12ACHMAD MUHAJJIR S. NURSAMBelum ada peringkat
- Robot Line FollowerDokumen10 halamanRobot Line FollowerAdityaFirdaus100% (1)
- Jobsheet PraktikumDokumen6 halamanJobsheet PraktikumNurjaman SaputraBelum ada peringkat
- ROBOT PERTANIANDokumen11 halamanROBOT PERTANIANlisa mawarniBelum ada peringkat
- Laporan Kasus 5 Barry-1Dokumen81 halamanLaporan Kasus 5 Barry-1Indriyanto SahjaBelum ada peringkat
- Religiusitas dan KesejahteraanDokumen153 halamanReligiusitas dan KesejahteraanIndriyanto SahjaBelum ada peringkat
- PERAN MEDIA SOSIAL SEBAGAI SARANA KOMUNIKASI DAKWAH (Studi Deskriptif Kualitatif Pada Akun Instagram Berani Berhijrah Dakwah Islam Pada Mahasiswi FKI UMS 2012)Dokumen7 halamanPERAN MEDIA SOSIAL SEBAGAI SARANA KOMUNIKASI DAKWAH (Studi Deskriptif Kualitatif Pada Akun Instagram Berani Berhijrah Dakwah Islam Pada Mahasiswi FKI UMS 2012)Indriyanto Sahja50% (2)
- Doa Setelah Selesai Membaca Al-Quran (Doa Khatam Qur'an - Doa Khotmil Quran) - Situs Pendidikan Islam No#1Dokumen1 halamanDoa Setelah Selesai Membaca Al-Quran (Doa Khatam Qur'an - Doa Khotmil Quran) - Situs Pendidikan Islam No#1Indriyanto Sahja100% (1)
- Persepsi Masyarakat Terhadap Lokalitas Program Acara Televisi Swasta LokalDokumen2 halamanPersepsi Masyarakat Terhadap Lokalitas Program Acara Televisi Swasta LokalIndriyanto SahjaBelum ada peringkat
- KomponenDokumen3 halamanKomponenIndriyanto SahjaBelum ada peringkat
- E Bisnis Dan E CommerceDokumen11 halamanE Bisnis Dan E CommerceIndriyanto SahjaBelum ada peringkat
- IndriyantoDokumen27 halamanIndriyantoIndriyanto SahjaBelum ada peringkat
- Skripsi - WagimanDokumen110 halamanSkripsi - WagimanIndriyanto Sahja100% (1)