Anda mungkin juga menyukai
- Dokumen - Tips Modul Mekanika Gerak Kendaraan Oto226 02Dokumen31 halamanDokumen - Tips Modul Mekanika Gerak Kendaraan Oto226 02Sena MahendraBelum ada peringkat
- Roda Gigi Strada TritonDokumen67 halamanRoda Gigi Strada TritonSPIDERMAN BAIK100% (1)
- Adit Priyadi - Modul Poros Penggerak RodaDokumen36 halamanAdit Priyadi - Modul Poros Penggerak RodaGilang RamadhanBelum ada peringkat
- Sistem PengapianDokumen7 halamanSistem Pengapiandoni noviantoBelum ada peringkat
- Transaxle LaporanDokumen11 halamanTransaxle Laporandedy wicaksonoBelum ada peringkat
- Contoh Makalah Siste RemDokumen50 halamanContoh Makalah Siste RemarifBelum ada peringkat
- MAKALAH PERENCANAAN V-BELT PADA KOMPRESORDokumen29 halamanMAKALAH PERENCANAAN V-BELT PADA KOMPRESORI Made BudikeBelum ada peringkat
- Makalah Kopling GesekDokumen23 halamanMakalah Kopling Geseknayfatin100% (1)
- Penggerak Roda DepanDokumen13 halamanPenggerak Roda DepanAnggerPangestuBelum ada peringkat
- Laporan Praktikum Sisem StarterDokumen9 halamanLaporan Praktikum Sisem Starterrakyan pasingsinganBelum ada peringkat
- Sistem SuspensiDokumen20 halamanSistem SuspensiFahreza MasyudiBelum ada peringkat
- REM CAKRAM SEPEDA MOTORDokumen17 halamanREM CAKRAM SEPEDA MOTOREzra Sonjaya100% (1)
- Modul Praktek Praktik Perawatan Dasar - BantalanDokumen83 halamanModul Praktek Praktik Perawatan Dasar - BantalanJoni SetiawanBelum ada peringkat
- Makalah Busi Pijar Motor DieselDokumen15 halamanMakalah Busi Pijar Motor DieselAndik cahyono0% (1)
- M Nur SATRIO 1422110021 Kerja Praktek Overhoul Engine Colt DieselDokumen80 halamanM Nur SATRIO 1422110021 Kerja Praktek Overhoul Engine Colt Dieselnur satrio0% (1)
- A. Nama Dan Fungsi Komponen Transmisi OtomatisDokumen10 halamanA. Nama Dan Fungsi Komponen Transmisi OtomatisNadhifBelum ada peringkat
- Cara Melepas Jok MobilDokumen1 halamanCara Melepas Jok MobilMarzuki IskandarBelum ada peringkat
- Balancing RodaDokumen5 halamanBalancing RodaAri Visanggeni100% (1)
- RENCANAKAN BANTALANDokumen6 halamanRENCANAKAN BANTALANzufan ninggir wicaksonoBelum ada peringkat
- Praktek Pembuatan GasketDokumen4 halamanPraktek Pembuatan GasketArifin XforceBelum ada peringkat
- Analisa Gangguan Sistem Pelumasan Pada AvanzaDokumen10 halamanAnalisa Gangguan Sistem Pelumasan Pada AvanzaUmi ZaharBelum ada peringkat
- Perhitungan Perbandingan Sistem KemudiDokumen7 halamanPerhitungan Perbandingan Sistem KemudiDidinMuhtadinBelum ada peringkat
- Elemen Mesin Dasar: Analisis Trainer Sistem Transmisi V-Belt, Rantai, dan PulleyDokumen25 halamanElemen Mesin Dasar: Analisis Trainer Sistem Transmisi V-Belt, Rantai, dan PulleyWaddiaaw OfficialBelum ada peringkat
- Pada Sistem Kemudi Yang Dapat DikunciDokumen8 halamanPada Sistem Kemudi Yang Dapat DikunciAndreasJuliskarBelum ada peringkat
- Laporan Perakitan Transmisi RantaiDokumen5 halamanLaporan Perakitan Transmisi RantaioksiBelum ada peringkat
- Front Axle Laporan SPTDokumen11 halamanFront Axle Laporan SPTmuhammad rifqiBelum ada peringkat
- Soal Ujian Teknologi Motor DieselDokumen5 halamanSoal Ujian Teknologi Motor DieselFendy PujiBelum ada peringkat
- DIAGNOSTIK STARTERDokumen4 halamanDIAGNOSTIK STARTERBothic Sebastiano Soebroto100% (1)
- Jalu Sasongko (201118) - Makalah Cara Kerja Mesin 4 Tak Dan 2 TakDokumen17 halamanJalu Sasongko (201118) - Makalah Cara Kerja Mesin 4 Tak Dan 2 Takyoni pratamaBelum ada peringkat
- Transmisi Penggerak DepanDokumen5 halamanTransmisi Penggerak DepanHendri RuswantoBelum ada peringkat
- Kopling SentrifugalDokumen91 halamanKopling Sentrifugaldwi_dop19Belum ada peringkat
- XII Pemeliharaan Sasis Dan Pemindah Tenaga Kendaraan RinganDokumen9 halamanXII Pemeliharaan Sasis Dan Pemindah Tenaga Kendaraan RinganJoko Nur Fitriyanto100% (1)
- Makalah Teknik Listrik OtomotifDokumen32 halamanMakalah Teknik Listrik OtomotifsAmpAh yoUtubeBelum ada peringkat
- Pemeriksaan & Penyetelan Rem TanganDokumen6 halamanPemeriksaan & Penyetelan Rem TanganArif LasfrendGuokiil100% (1)
- Jobsheet FwaDokumen9 halamanJobsheet Fwafandi anamBelum ada peringkat
- Laporan PraktikumDokumen37 halamanLaporan Praktikumalfiatuz0% (1)
- Laporan Praktik FWADokumen12 halamanLaporan Praktik FWAToni Catur SetiyadiBelum ada peringkat
- Kelistrikan Kelas XIDokumen5 halamanKelistrikan Kelas XIApri HadyBelum ada peringkat
- Kelopok 2 Suspensi WishboneDokumen37 halamanKelopok 2 Suspensi WishboneArdianyogi SaputraBelum ada peringkat
- Bab III Analisa Dan Perhitungan Rem Tromol 1Dokumen15 halamanBab III Analisa Dan Perhitungan Rem Tromol 1Chartens PratamaBelum ada peringkat
- Laporan KRS Rem TromolDokumen16 halamanLaporan KRS Rem TromolRama DhaniBelum ada peringkat
- Pemeliharaan SerDokumen13 halamanPemeliharaan SerJack SadiBelum ada peringkat
- FWADokumen10 halamanFWAbesty08526415Belum ada peringkat
- Makalah BalancingDokumen12 halamanMakalah BalancingRicho MuhammadBelum ada peringkat
- Perancangan PistonDokumen27 halamanPerancangan PistonToni EkamasBelum ada peringkat
- Makalah Transmisi Otomatis Pada MobilDokumen15 halamanMakalah Transmisi Otomatis Pada MobilAnakmami201Belum ada peringkat
- Kopling OtomatisDokumen16 halamanKopling Otomatisjulius pandapotan simbolonBelum ada peringkat
- SISTEM PENGAPIAN MOBILDokumen1 halamanSISTEM PENGAPIAN MOBILDrizzle ShanBelum ada peringkat
- Ujian Akhir Semester PSSM KLS XiDokumen5 halamanUjian Akhir Semester PSSM KLS XiAgus SupriyantoBelum ada peringkat
- Modul Rem KonvensionalDokumen12 halamanModul Rem KonvensionalJohan NurfauzanBelum ada peringkat
- Laporan PraktikumDokumen18 halamanLaporan PraktikumheruBelum ada peringkat
- Drawing Baut Dan MurDokumen1 halamanDrawing Baut Dan MurfaisalBelum ada peringkat
- Roda BanDokumen7 halamanRoda BanNael MrboenBelum ada peringkat
- Sistem Peredam Kejut (Suspensi) Sepeda MotorDokumen38 halamanSistem Peredam Kejut (Suspensi) Sepeda MotorBai HalmaBelum ada peringkat
- SISTEM SUSPENSIDokumen15 halamanSISTEM SUSPENSIEdu EdaBelum ada peringkat
- Sistem KendaraanDokumen2 halamanSistem KendaraanRizka RahmasariBelum ada peringkat
- Bintha - Diagram Kerja Katup Motor DieselDokumen4 halamanBintha - Diagram Kerja Katup Motor DieselMirza AdiwinarsyahBelum ada peringkat
- Elemen Mekanik OtomotifDokumen9 halamanElemen Mekanik OtomotifSurya IrawanBelum ada peringkat
- Modul Pengereman Kendaraan From UnyDokumen41 halamanModul Pengereman Kendaraan From UnyFuad AbdillahBelum ada peringkat
- Modul Sistem Pengapian Universitas Negeri YogyakartaDokumen73 halamanModul Sistem Pengapian Universitas Negeri YogyakartaTejaBelum ada peringkat
- Panduan KMLI XII - 2023Dokumen33 halamanPanduan KMLI XII - 2023Fadil AhnafBelum ada peringkat
- Minggu 7 Pertemuan 14 Latihan Soal Tegangan LenturDokumen13 halamanMinggu 7 Pertemuan 14 Latihan Soal Tegangan LenturFadil AhnafBelum ada peringkat
- SPTJM-MSIBDokumen2 halamanSPTJM-MSIBirsa sharfinaBelum ada peringkat
- Press Tool 2Dokumen41 halamanPress Tool 2Fadil AhnafBelum ada peringkat
- LAPORAN PERANCANGAN PERKAKAS MESIN-ME2E-KELOMPOK 2 Ketua Destri Tegar KDokumen15 halamanLAPORAN PERANCANGAN PERKAKAS MESIN-ME2E-KELOMPOK 2 Ketua Destri Tegar KFadil AhnafBelum ada peringkat
- MENGEJAR KARIRDokumen9 halamanMENGEJAR KARIRFadil AhnafBelum ada peringkat
- FESC IIMS 2022Dokumen50 halamanFESC IIMS 2022Fadil AhnafBelum ada peringkat
- FORMAT LAPORAN PRAKTIKUM - XXDokumen7 halamanFORMAT LAPORAN PRAKTIKUM - XXFadil AhnafBelum ada peringkat
- Perguruan Tinggi Peserta Latihan Bersama Dan Time AttackDokumen1 halamanPerguruan Tinggi Peserta Latihan Bersama Dan Time AttackFadil AhnafBelum ada peringkat
- OPTIMASI SISTEM PERSAMAAN DIFERENSIALDokumen12 halamanOPTIMASI SISTEM PERSAMAAN DIFERENSIALFadil AhnafBelum ada peringkat
- Soal Tes PPM - Semester3 - 2Dokumen1 halamanSoal Tes PPM - Semester3 - 2Fadil AhnafBelum ada peringkat
- SURAT IJIN ORANG TUA UNTUK ORGANISASI MOBIL LISTRIKDokumen1 halamanSURAT IJIN ORANG TUA UNTUK ORGANISASI MOBIL LISTRIKFadil AhnafBelum ada peringkat
- GBR2Dokumen1 halamanGBR2Fadil AhnafBelum ada peringkat
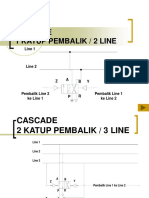
- Cara Kerja Katup Pembalik CascadeDokumen4 halamanCara Kerja Katup Pembalik CascadeFadil AhnafBelum ada peringkat
- Kemampuan BerbahasaDokumen8 halamanKemampuan BerbahasaFadil AhnafBelum ada peringkat
- F. Bab Ii PDFDokumen21 halamanF. Bab Ii PDFFadil AhnafBelum ada peringkat
- Laporan Praktikum Mencetak Plastik Mesin InjeksiDokumen2 halamanLaporan Praktikum Mencetak Plastik Mesin InjeksiFadil AhnafBelum ada peringkat
- JudulDokumen12 halamanJudulFadil AhnafBelum ada peringkat
- GBR5Dokumen1 halamanGBR5Fadil AhnafBelum ada peringkat
- GBR 1Dokumen1 halamanGBR 1Fadil AhnafBelum ada peringkat
- GBR 3Dokumen1 halamanGBR 3Fadil AhnafBelum ada peringkat
- Jobsheet Pelapisan Cu, Nikel Dan Anodizing Dan Format LaporanDokumen27 halamanJobsheet Pelapisan Cu, Nikel Dan Anodizing Dan Format LaporanFadil AhnafBelum ada peringkat
- GBR4Dokumen1 halamanGBR4Fadil AhnafBelum ada peringkat
- Cover LaporanDokumen1 halamanCover LaporanFadil AhnafBelum ada peringkat
- JakaknDokumen1 halamanJakaknFadil AhnafBelum ada peringkat
- OPTIMASI KEMUDI GOKARTDokumen14 halamanOPTIMASI KEMUDI GOKARTFadil AhnafBelum ada peringkat
- OPTIMASI KEMUDI GOKARTDokumen14 halamanOPTIMASI KEMUDI GOKARTFadil AhnafBelum ada peringkat
- Soal UTS Gambar Mesin 2 - 08062022Dokumen5 halamanSoal UTS Gambar Mesin 2 - 08062022Fadil AhnafBelum ada peringkat
- Cover LaprakDokumen3 halamanCover LaprakFadil AhnafBelum ada peringkat
- Otomotif Sudut BelokDokumen20 halamanOtomotif Sudut BelokFadil Ahnaf50% (2)