Anda mungkin juga menyukai
- Pengendalian LevelDokumen60 halamanPengendalian LevelNurul FathatunBelum ada peringkat
- CRL1Dokumen12 halamanCRL1Kim GegeBelum ada peringkat
- Laporan Tetap CRL 1Dokumen15 halamanLaporan Tetap CRL 1Ahda AzaliaBelum ada peringkat
- Laporan Sementara CRL WilliamDokumen24 halamanLaporan Sementara CRL WilliamWilliam MackenzieBelum ada peringkat
- CRL Kel 1Dokumen10 halamanCRL Kel 1anis hhBelum ada peringkat
- Pengendalian On-OffDokumen19 halamanPengendalian On-OffPichettiBelum ada peringkat
- Laporan Tetap CRL 1Dokumen12 halamanLaporan Tetap CRL 1Putra LangitBelum ada peringkat
- Laporan Tetap CRL 1 PianDokumen8 halamanLaporan Tetap CRL 1 PianAfrian VianBelum ada peringkat
- Laporan Tetap CRL 1Dokumen13 halamanLaporan Tetap CRL 1Ester Silalahi100% (1)
- CRL 1Dokumen13 halamanCRL 1Zuraida Dwii SoetjiptoBelum ada peringkat
- Laporan Tetap Pengendalian Proses Pengendalian Ketinggian Fluida (CRL-1)Dokumen16 halamanLaporan Tetap Pengendalian Proses Pengendalian Ketinggian Fluida (CRL-1)Dona WulandariBelum ada peringkat
- Laporan Tetap Praktikum Proses (CRL 1)Dokumen14 halamanLaporan Tetap Praktikum Proses (CRL 1)eka ekaBelum ada peringkat
- Laporan Tetap CRL 1Dokumen10 halamanLaporan Tetap CRL 1anis wahyu ningsihBelum ada peringkat
- Laporan Tetap Praktikum Instrumentasi Dan Kontrol: CRL IDokumen14 halamanLaporan Tetap Praktikum Instrumentasi Dan Kontrol: CRL IMiranda Dwi CendaniBelum ada peringkat
- Pengukuran Ketinggian Fluida (Ii)Dokumen15 halamanPengukuran Ketinggian Fluida (Ii)Herlin LiniaBelum ada peringkat
- Pengendalian ResistiveDokumen7 halamanPengendalian ResistiveAGUNGBelum ada peringkat
- Control Valve-Teknik Kimia-Politeknik Negeri BandungDokumen22 halamanControl Valve-Teknik Kimia-Politeknik Negeri BandungNendryNurramdaniSolihahBelum ada peringkat
- Laporan Praktikum Pengendalian LevelDokumen28 halamanLaporan Praktikum Pengendalian LevelRosyidah KhoirunnisaBelum ada peringkat
- InstrumenDokumen8 halamanInstrumenRagilBelum ada peringkat
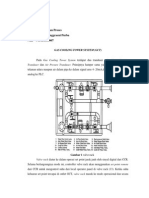
- Gas Cooling Tower System Tugas PengprosDokumen7 halamanGas Cooling Tower System Tugas Pengprosmonica_shaddyBelum ada peringkat
- Kalibrasi SensorDokumen13 halamanKalibrasi SensorFatahillah AtaBelum ada peringkat
- Pressure ControlDokumen17 halamanPressure ControlJuraymaks FirdausBelum ada peringkat
- Pengendalian Ketinggian Fluida (CRL) : Tujuan PercobaanDokumen50 halamanPengendalian Ketinggian Fluida (CRL) : Tujuan PercobaanAnonymous ntDqkUZHBelum ada peringkat
- Pengendalian Level CairanDokumen23 halamanPengendalian Level CairanAhmadi FachryBelum ada peringkat
- CRL 1,2,3 Full-1Dokumen31 halamanCRL 1,2,3 Full-1Adella RahmawatiBelum ada peringkat
- Pengendalian Aliran (Rev-8 2020)Dokumen11 halamanPengendalian Aliran (Rev-8 2020)HeeBelum ada peringkat
- Pengendalian Aliran (Rev-7 2019)Dokumen12 halamanPengendalian Aliran (Rev-7 2019)hbakriBelum ada peringkat
- Pengendalian Level CairanDokumen36 halamanPengendalian Level CairanAngga Gunawan0% (2)
- Laporan - Pompa Air OtomatisDokumen11 halamanLaporan - Pompa Air OtomatisNugroho BagusBelum ada peringkat
- Pengendalian LevelDokumen12 halamanPengendalian LevelBESTY LOVIANDABelum ada peringkat
- Laporan Tetap PC13Dokumen21 halamanLaporan Tetap PC13ahmad abu bakarBelum ada peringkat
- Kerangka Laporan Control LevelDokumen18 halamanKerangka Laporan Control LevelWidya AstutiBelum ada peringkat
- PERTEMUAN KE-12 STRATEGI PENGENDALIAN LANJUT (Lanjutan) PDFDokumen5 halamanPERTEMUAN KE-12 STRATEGI PENGENDALIAN LANJUT (Lanjutan) PDFesiBelum ada peringkat
- Aplikasi DCS Dan ScadaDokumen19 halamanAplikasi DCS Dan ScadaNanda PrasetyoBelum ada peringkat
- Makalah TekananDokumen18 halamanMakalah TekananNashru ImaruziBelum ada peringkat
- 0.1 Laprak Korelasi BesaranDokumen24 halaman0.1 Laprak Korelasi BesaranIchsan ArdiansyahBelum ada peringkat
- Daftar Hadir MahasiswaDokumen31 halamanDaftar Hadir MahasiswaRenoBelum ada peringkat
- 5 Komponen Dasar Sistem Kontrol ElektropneumtikDokumen11 halaman5 Komponen Dasar Sistem Kontrol ElektropneumtikRangga BuanaBelum ada peringkat
- Process Control Pengendalian InstrumentasiDokumen135 halamanProcess Control Pengendalian InstrumentasiEsterBelum ada peringkat
- DF (Dinamika Aliran)Dokumen9 halamanDF (Dinamika Aliran)Mohammad Rizal Al FIkryBelum ada peringkat
- Level ControlDokumen52 halamanLevel ControlAhmad AliBelum ada peringkat
- Selective ControlDokumen15 halamanSelective ControlChintia Shakila Chintia ShakilaBelum ada peringkat
- Simulasi Peralatan PengendaliDokumen36 halamanSimulasi Peralatan PengendaliAyu DzakirohBelum ada peringkat
- Pengukuran LevelDokumen28 halamanPengukuran LevelSaifulFallah100% (2)
- LAPORAN LevelDokumen27 halamanLAPORAN LevelDheanti RizkyBelum ada peringkat
- Pengantar Sistem KontrolDokumen8 halamanPengantar Sistem KontrolRudy RealitantoBelum ada peringkat
- UTS Sistem InstrumentasiDokumen19 halamanUTS Sistem InstrumentasiMuhammad Akbar HariyonoBelum ada peringkat
- Hvac (Heating Ventilating Air Conditioner)Dokumen6 halamanHvac (Heating Ventilating Air Conditioner)Silvi Wildia Hariadi PribadiBelum ada peringkat
- PRAKTIKUM 1 - PENGANTAR KONTROL OTOMATIK - Panji LarasDokumen9 halamanPRAKTIKUM 1 - PENGANTAR KONTROL OTOMATIK - Panji LarasRamadhan AttallahBelum ada peringkat
- Control ValveDokumen24 halamanControl ValvetrianaBelum ada peringkat
- 5 KB - Felisia Hanura - Pengendalian ProsesDokumen3 halaman5 KB - Felisia Hanura - Pengendalian ProsesDina LestariBelum ada peringkat
- Panduan Persiapan Operasi Start-Up Desalination Plant 5-7Dokumen25 halamanPanduan Persiapan Operasi Start-Up Desalination Plant 5-7arif ihwandaBelum ada peringkat
- SK Calon Kandidat Hijau 2018Dokumen39 halamanSK Calon Kandidat Hijau 2018Hilda RBelum ada peringkat
- Soal Uts - Aliran Dua Fase - 25!11!2018 - Kelas 01Dokumen1 halamanSoal Uts - Aliran Dua Fase - 25!11!2018 - Kelas 01Hilda RBelum ada peringkat
- ErgonomiDokumen22 halamanErgonomihildaBelum ada peringkat
- Komunikasi k3Dokumen24 halamanKomunikasi k3Hilda R100% (1)
- 10.bahaya Listrik - TLDokumen19 halaman10.bahaya Listrik - TLYrasmitha SariBelum ada peringkat
- Tata Cara Penulisan Formulir Dan DenahDokumen4 halamanTata Cara Penulisan Formulir Dan DenahHilda RBelum ada peringkat
- Desain Papan Nama CerobongDokumen1 halamanDesain Papan Nama CerobongHilda RBelum ada peringkat
- Corrosion InhibitorDokumen3 halamanCorrosion InhibitorHilda RBelum ada peringkat
- Bag Depan PMWDokumen2 halamanBag Depan PMWHilda RBelum ada peringkat
- Persentasi Bahasa IndonesiaDokumen13 halamanPersentasi Bahasa IndonesiaHilda RBelum ada peringkat
- Erlina ArikawatiDokumen8 halamanErlina ArikawatiHilda RBelum ada peringkat
- Standar Mutu Minyak Goreng Berdasarkan SNIDokumen1 halamanStandar Mutu Minyak Goreng Berdasarkan SNIHilda RBelum ada peringkat
- Cabang KelentengDokumen1 halamanCabang KelentengHilda RBelum ada peringkat
- Makalah Data Dan GrafikDokumen37 halamanMakalah Data Dan GrafikHilda RBelum ada peringkat
- Makalah Udara Pabrik, Udara Instrument Dan Listrik Kelas 5KCDokumen22 halamanMakalah Udara Pabrik, Udara Instrument Dan Listrik Kelas 5KCHilda RBelum ada peringkat
- Persentasi Hilda, Intan KikiDokumen30 halamanPersentasi Hilda, Intan KikiHilda RBelum ada peringkat
- HiDokumen4 halamanHiHilda RBelum ada peringkat
- Bab IDokumen37 halamanBab IHilda R100% (1)
- Ran CobDokumen13 halamanRan Cobrichardson sitohangBelum ada peringkat
- Makalah Menulis Karya IlmiahDokumen27 halamanMakalah Menulis Karya IlmiahHilda R100% (1)
- KALORDokumen15 halamanKALORHilda RBelum ada peringkat
- Makalah Udara Pabrik, Udara Instrument Dan Listrik Kelas 5KCDokumen22 halamanMakalah Udara Pabrik, Udara Instrument Dan Listrik Kelas 5KCHilda RBelum ada peringkat
- Laporan KKL Fixx BenerDokumen52 halamanLaporan KKL Fixx BenerHilda RBelum ada peringkat
- Mikro PengolahanDokumen43 halamanMikro PengolahanHilda RBelum ada peringkat
- Neraca MasaaDokumen14 halamanNeraca MasaaHilda RBelum ada peringkat
- Penetapan Kadar Protein Dengan Metode Kjeldahl HildaDokumen13 halamanPenetapan Kadar Protein Dengan Metode Kjeldahl HildaHilda RBelum ada peringkat
- Analisa Kadar Serat Kasar Dalam Suatu SampelDokumen10 halamanAnalisa Kadar Serat Kasar Dalam Suatu SampelHilda R100% (2)
- Soal Pengopsis BatubaraDokumen5 halamanSoal Pengopsis BatubaraHilda RBelum ada peringkat
- Contoh Kasus Pada Diagram VaretoDokumen5 halamanContoh Kasus Pada Diagram VaretoHilda R80% (5)
- Saus Tomat FileDokumen10 halamanSaus Tomat FileHilda RBelum ada peringkat