Anda mungkin juga menyukai
- Bahasa Inggris Sistem 52M Volume 2Dari EverandBahasa Inggris Sistem 52M Volume 2Penilaian: 4.5 dari 5 bintang4.5/5 (7)
- Makalah SensorDokumen10 halamanMakalah Sensor4c1nBelum ada peringkat
- Makalah SensorDokumen12 halamanMakalah SensorM. ReskyBelum ada peringkat
- Aplikasi Embedded System Dengan Sensor Ultrasonic Dan Microcontroller Atmega 8535 Untuk Pengukur Tinggi BadanDokumen13 halamanAplikasi Embedded System Dengan Sensor Ultrasonic Dan Microcontroller Atmega 8535 Untuk Pengukur Tinggi BadanGus PrabBelum ada peringkat
- Makalah RobotikaDokumen17 halamanMakalah RobotikaFaiz ZaynBelum ada peringkat
- MAKALAH Tachometer Dan LuxmeterDokumen16 halamanMAKALAH Tachometer Dan LuxmeterM. RizkyBelum ada peringkat
- Review Jurnal Robotik Pemadam Api2Dokumen13 halamanReview Jurnal Robotik Pemadam Api2faizal suten100% (1)
- Makalah LVDTDokumen14 halamanMakalah LVDTIsmi hikmawatiBelum ada peringkat
- Makalah Tachometer Kel.6 Lt1aDokumen13 halamanMakalah Tachometer Kel.6 Lt1aItsuki HashimaBelum ada peringkat
- Makalah Sensor MekanikDokumen28 halamanMakalah Sensor MekanikBagus Wahyu NugrahaBelum ada peringkat
- Laporan Akhir MekatronikaDokumen20 halamanLaporan Akhir Mekatronikailham dwi putraBelum ada peringkat
- Makalah Robotik Rayhan Maulana 2010912030Dokumen14 halamanMakalah Robotik Rayhan Maulana 2010912030Rayhan MaulanaBelum ada peringkat
- Menulis Makalah, Rangkuman, Dan Buku Serta Membaca Untuk Menulis AkademikDokumen13 halamanMenulis Makalah, Rangkuman, Dan Buku Serta Membaca Untuk Menulis AkademikNyi ReniBelum ada peringkat
- Makalah Elektronika Instrumen SensorDokumen20 halamanMakalah Elektronika Instrumen SensorDwi HaadiBelum ada peringkat
- Sensor Dan TransduserDokumen78 halamanSensor Dan TransduserAri Yuga AswaraBelum ada peringkat
- Tugas Kelompok Sensor Dan AkuatorDokumen18 halamanTugas Kelompok Sensor Dan AkuatorSovi PebrianiBelum ada peringkat
- Proposal Perancangan Sistem Elektronika AliDokumen17 halamanProposal Perancangan Sistem Elektronika AliAli AbdullahBelum ada peringkat
- Makalah Sensor Dan Tranduser-2Dokumen30 halamanMakalah Sensor Dan Tranduser-2Fiko SenrianokxiBelum ada peringkat
- Sensor Dalam Dunia TeknikDokumen10 halamanSensor Dalam Dunia TeknikCOC JuniorBelum ada peringkat
- Laporan Oto Elektronika UasDokumen24 halamanLaporan Oto Elektronika UasRydho Putra PradanaBelum ada peringkat
- OktaKFM 1955201167 Robotika KelasGDokumen7 halamanOktaKFM 1955201167 Robotika KelasGNiia KfmBelum ada peringkat
- TUGAS M7 - Makalah Pengukuran TeknikDokumen12 halamanTUGAS M7 - Makalah Pengukuran TeknikMona WinarnoBelum ada peringkat
- Tugas Intrumentasii CharlosDokumen39 halamanTugas Intrumentasii CharlosPeenangin 123Belum ada peringkat
- Makalah Sensor Ultrsonik 2019Dokumen21 halamanMakalah Sensor Ultrsonik 2019Mohammad NasutionBelum ada peringkat
- Kata PengantarDokumen10 halamanKata PengantarNovia AnnisaBelum ada peringkat
- Tugas04 187002040 Willy Gumelar BDokumen8 halamanTugas04 187002040 Willy Gumelar B187OO2O74 Adi SunandarBelum ada peringkat
- Pembuatan Sensor Cahaya LDRDokumen14 halamanPembuatan Sensor Cahaya LDRSugiBelum ada peringkat
- Laporan Pembuatan Prototype ArduinoDokumen12 halamanLaporan Pembuatan Prototype ArduinoAnisanhBelum ada peringkat
- Laporan Tugas Akhir Fisika DasarDokumen18 halamanLaporan Tugas Akhir Fisika DasarLalaBelum ada peringkat
- Perancangan Dan Pembuatan Robot DMKRDokumen14 halamanPerancangan Dan Pembuatan Robot DMKRBadboyfunky GatelBelum ada peringkat
- Bab1 Kelompok 10Dokumen7 halamanBab1 Kelompok 10Bagus AryowibowoBelum ada peringkat
- Skripsi M. Aris Munandar 5115111681 (2011)Dokumen92 halamanSkripsi M. Aris Munandar 5115111681 (2011)Rizal Ma'arifBelum ada peringkat
- Makalah MekatronikaDokumen18 halamanMakalah Mekatronikasandi kurniawanBelum ada peringkat
- Muh Afdal RismawanDokumen25 halamanMuh Afdal RismawanYudi PawanBelum ada peringkat
- Laporan Praktikum Sistem MikrokontrolerDokumen23 halamanLaporan Praktikum Sistem MikrokontrolerMuhamad Andriyan PermanaBelum ada peringkat
- Laporan MicroSADokumen21 halamanLaporan MicroSAMuhamad MaudiawanBelum ada peringkat
- Cover Studi IslamDokumen6 halamanCover Studi IslamAnonymous 1Belum ada peringkat
- MAKALAH SENSOR DAN TRANDUSER Kel 1BDokumen18 halamanMAKALAH SENSOR DAN TRANDUSER Kel 1BZikri MakrufBelum ada peringkat
- Alat-Alat ListrikDokumen23 halamanAlat-Alat ListrikFarisRizki RamadhaniBelum ada peringkat
- Makalah Elektronika Dasar3Dokumen12 halamanMakalah Elektronika Dasar3Rusdi HutabaratBelum ada peringkat
- Luxmeter Kelompok 5 LT 1e - 1Dokumen17 halamanLuxmeter Kelompok 5 LT 1e - 1Jonghyun KimBelum ada peringkat
- Sensor Dan AktuatorDokumen30 halamanSensor Dan AktuatorRisha Windiarsi100% (1)
- Makalah Arsitektur Dan OrganisasiDokumen12 halamanMakalah Arsitektur Dan OrganisasiArdo AlfinnnBelum ada peringkat
- Makalah RobotikDokumen11 halamanMakalah RobotikFera AguriniBelum ada peringkat
- Makalah Sistem Pencacah JadiDokumen36 halamanMakalah Sistem Pencacah Jadiafton ilman hudaBelum ada peringkat
- Ach. Zanadin Zidan - Lapaw M8Dokumen23 halamanAch. Zanadin Zidan - Lapaw M8RidwanBelum ada peringkat
- Kelompok 7 Kecerdasan buatanFIXDokumen24 halamanKelompok 7 Kecerdasan buatanFIXZASKIAHBelum ada peringkat
- Makalah Klasifikasi SensorDokumen17 halamanMakalah Klasifikasi SensorAgungBelum ada peringkat
- Makalah Sensor Pada Robotika (Kelompok 4)Dokumen28 halamanMakalah Sensor Pada Robotika (Kelompok 4)Angga lazikenBelum ada peringkat
- Proposal Robot SpiderDokumen12 halamanProposal Robot SpiderM Fadil Ramadhan Pratama0% (1)
- TUGASDokumen9 halamanTUGAS2qbx69bz4mBelum ada peringkat
- ABSTRAKDokumen7 halamanABSTRAKtheayanhaBelum ada peringkat
- Laporan Tugas Akhir RobotikDokumen19 halamanLaporan Tugas Akhir RobotikIam IbrahimBelum ada peringkat
- Rancang Bangun Alat Pendeteksi Logam Ber PDFDokumen25 halamanRancang Bangun Alat Pendeteksi Logam Ber PDFDenny Rachmad Atthahary0% (1)
- Elsavira MF Tugas BAB 9Dokumen13 halamanElsavira MF Tugas BAB 9Elsa ViraBelum ada peringkat
- Makalah Sensor Dan TransduserDokumen30 halamanMakalah Sensor Dan TransduserWahyu WidodoBelum ada peringkat
- Laporan Pembuatan Alat MonitoringDokumen20 halamanLaporan Pembuatan Alat MonitoringYusrifal KaBelum ada peringkat
- Project UAS Metodologi Riset - 22041088Dokumen20 halamanProject UAS Metodologi Riset - 22041088alvinbagassetiono7Belum ada peringkat
- PTE Sensor Dan TranduserDokumen17 halamanPTE Sensor Dan TranduserAhmadd Soultounii Arex TptuBelum ada peringkat
- Makalah SensorDokumen18 halamanMakalah SensorGamar BasukiBelum ada peringkat
- IchaDokumen1 halamanIchaHerlin SetyawanBelum ada peringkat
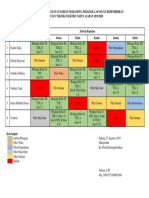
- Daftar Piket Mahasiswa Teknik KetenagalistrikanDokumen1 halamanDaftar Piket Mahasiswa Teknik KetenagalistrikanHerlin SetyawanBelum ada peringkat
- Skripsi Herlin v.2 AtasDokumen1 halamanSkripsi Herlin v.2 AtasHerlin SetyawanBelum ada peringkat
- IchaDokumen1 halamanIchaHerlin SetyawanBelum ada peringkat
- Konfigurasi Hubungan Belitan Transformator 3 FasaDokumen9 halamanKonfigurasi Hubungan Belitan Transformator 3 FasaHerlin SetyawanBelum ada peringkat
- Jobsheet KlemDokumen3 halamanJobsheet KlemHerlin SetyawanBelum ada peringkat
- Surat IzinDokumen1 halamanSurat IzinHerlin SetyawanBelum ada peringkat
- Data Generator DC Penguat TerpisahDokumen6 halamanData Generator DC Penguat TerpisahHerlin SetyawanBelum ada peringkat
- IsiDokumen60 halamanIsiHerlin SetyawanBelum ada peringkat
- Lembaran Rekapitulasi Tugas Pedagogi Kejuruan: KeteranganDokumen1 halamanLembaran Rekapitulasi Tugas Pedagogi Kejuruan: KeteranganHerlin SetyawanBelum ada peringkat
- Daftar PustakaDokumen1 halamanDaftar PustakaHerlin SetyawanBelum ada peringkat
- Absen PLKDokumen1 halamanAbsen PLKHerlin SetyawanBelum ada peringkat
- SKPBM 2015-2016 S IiDokumen2 halamanSKPBM 2015-2016 S IiHerlin SetyawanBelum ada peringkat
- Rubrik Prnilaian PsikomotorDokumen3 halamanRubrik Prnilaian PsikomotorHerlin SetyawanBelum ada peringkat
- Penyearah Setengah GelombangDokumen4 halamanPenyearah Setengah GelombangHerlin SetyawanBelum ada peringkat
- Makala HDokumen2 halamanMakala HHerlin SetyawanBelum ada peringkat
- PTK JibarlisDokumen17 halamanPTK JibarlisHerlin SetyawanBelum ada peringkat
- PTK JibarlisDokumen17 halamanPTK JibarlisHerlin SetyawanBelum ada peringkat
- RPP Baskt PTK 1.Dokumen6 halamanRPP Baskt PTK 1.Herlin SetyawanBelum ada peringkat
- Kewirausahaan Dalam Oranisasi BisnisDokumen5 halamanKewirausahaan Dalam Oranisasi BisnisHerlin SetyawanBelum ada peringkat
- Silabus Mapel Sistem Kontrol Terprogram Kelas XI 2018Dokumen4 halamanSilabus Mapel Sistem Kontrol Terprogram Kelas XI 2018Herlin SetyawanBelum ada peringkat
- Uji Homogenitas PDFDokumen5 halamanUji Homogenitas PDFHerlin SetyawanBelum ada peringkat
- Tugas 1Dokumen3 halamanTugas 1Herlin SetyawanBelum ada peringkat
- Makalah ALat Ukur ListrikDokumen24 halamanMakalah ALat Ukur ListrikInge Dwi Wahyuningtyas60% (5)
- Pedoman Penyusunan SAPDokumen4 halamanPedoman Penyusunan SAPHerlin SetyawanBelum ada peringkat
- Tugas 1Dokumen3 halamanTugas 1Herlin SetyawanBelum ada peringkat
- Rubrik Prnilaian PsikomotorDokumen3 halamanRubrik Prnilaian PsikomotorHerlin SetyawanBelum ada peringkat
- Silabus Mapel Sistem Kontrol Terprogram Kelas XI 2018Dokumen13 halamanSilabus Mapel Sistem Kontrol Terprogram Kelas XI 2018RizkieBelum ada peringkat
- SapDokumen11 halamanSapMulyawan Safwandy NugrahaBelum ada peringkat
- Pertanyaan KulkasDokumen5 halamanPertanyaan KulkasHerlin SetyawanBelum ada peringkat