Anda mungkin juga menyukai
- Pengantar Teknik PengaturanDokumen46 halamanPengantar Teknik PengaturanBoodee PrayBelum ada peringkat
- Laporan LenganRobot Kel 6Dokumen21 halamanLaporan LenganRobot Kel 6Zaidan Naufal100% (1)
- Bab1 Karakteristik Dan Aplikasi PneumatikDokumen44 halamanBab1 Karakteristik Dan Aplikasi PneumatikAgung Surya Nugraha IIBelum ada peringkat
- Modul Praktikum Elektro Pneumatik Fixed OnieDokumen86 halamanModul Praktikum Elektro Pneumatik Fixed OnieYosuaBelum ada peringkat
- Laporan Praktikum MekatronikaDokumen11 halamanLaporan Praktikum MekatronikaIsnaeni YuliantiBelum ada peringkat
- Mochamad Fandhi I - 190511630885 - A2 - ResumePertemuan1Dokumen9 halamanMochamad Fandhi I - 190511630885 - A2 - ResumePertemuan1Alwi MaulanaBelum ada peringkat
- Fernanda Syafyuda Novarian Pradana - 190511630846Dokumen7 halamanFernanda Syafyuda Novarian Pradana - 190511630846Alwi MaulanaBelum ada peringkat
- Laporan ConveyorDokumen8 halamanLaporan ConveyordestaBelum ada peringkat
- SIstem KontrolDokumen8 halamanSIstem KontrolTeja TebloeBelum ada peringkat
- Makalah Pengantar Teknik KontrolDokumen16 halamanMakalah Pengantar Teknik KontrolBagasBelum ada peringkat
- Laporan Praktikum Pak Yafi MbubDokumen24 halamanLaporan Praktikum Pak Yafi MbubAgus ProboBelum ada peringkat
- 08 6623 TKT312 052019 PDFDokumen9 halaman08 6623 TKT312 052019 PDFTI Sebastianus DanielBelum ada peringkat
- Aktuator Dan PlantDokumen12 halamanAktuator Dan PlantAhmad ItsnainiBelum ada peringkat
- Bab 10Dokumen4 halamanBab 10Agung Septiawan BaharBelum ada peringkat
- Otomasi Sistem Produksi UpdateDokumen90 halamanOtomasi Sistem Produksi UpdateAndy P. Wirawan0% (1)
- Tugas 1 - Gatra Wanara Seta - Sistem KendaliDokumen6 halamanTugas 1 - Gatra Wanara Seta - Sistem Kendaliyekbedo06Belum ada peringkat
- Tugas 2 Makalah Tentang Mesin Dengan Prinsip Kerja Pneumatik Dan Hidrolik Puji Almansyur Deden KoswaraDokumen9 halamanTugas 2 Makalah Tentang Mesin Dengan Prinsip Kerja Pneumatik Dan Hidrolik Puji Almansyur Deden KoswarapujialmansyurBelum ada peringkat
- TugasDokumen7 halamanTugasRama PradanaBelum ada peringkat
- 4.1.1-4.1.3asas RobotikDokumen41 halaman4.1.1-4.1.3asas RobotikChong Wan YikBelum ada peringkat
- Presentasi Mekatronika-2Dokumen44 halamanPresentasi Mekatronika-2jimmy_d_nasutionBelum ada peringkat
- TUGAS MEKATRONIKA Minggu 8-Penegenalan Hidrolik Dan PneumatikDokumen12 halamanTUGAS MEKATRONIKA Minggu 8-Penegenalan Hidrolik Dan PneumatikDenil SonBelum ada peringkat
- Teori Dasar OtomasiDokumen16 halamanTeori Dasar OtomasiAle' AmoudiBelum ada peringkat
- PenderiaDokumen32 halamanPenderiaKamaruddin Ahmad As-SambiriyBelum ada peringkat
- Kelompok 7: Tugas Sistem Hidrolik Dan PneumatikDokumen12 halamanKelompok 7: Tugas Sistem Hidrolik Dan PneumatikImam IbadBelum ada peringkat
- KapselDokumen13 halamanKapselNabil Taufiq Nur IzzatBelum ada peringkat
- Laporan Proyek Sistem Manufaktur Terpadu - Hidayah CahyaDokumen43 halamanLaporan Proyek Sistem Manufaktur Terpadu - Hidayah CahyaShandy SyahrizalBelum ada peringkat
- Aktuator Tugas Pengpros FixDokumen8 halamanAktuator Tugas Pengpros FixKURNILAH AZZAHRABelum ada peringkat
- Tugas Kelompok Mekatron Terbaru 11Dokumen15 halamanTugas Kelompok Mekatron Terbaru 11Rizkimhd FadhelBelum ada peringkat
- PneumatikDokumen13 halamanPneumatiksyarifah farhahBelum ada peringkat
- 22 Pengembangan Prototipe Smart Blade Pada Turbin Angin Berbasis Servo Pneumatik PDFDokumen6 halaman22 Pengembangan Prototipe Smart Blade Pada Turbin Angin Berbasis Servo Pneumatik PDFZefanya GurningBelum ada peringkat
- Job 1Dokumen30 halamanJob 1Nina AmaliyaBelum ada peringkat
- Bab 1 Konsep Umum Sistem Kontrol DDokumen11 halamanBab 1 Konsep Umum Sistem Kontrol DdameBelum ada peringkat
- Pneumatik Secara UmumDokumen13 halamanPneumatik Secara UmumAkku Tak BernamaBelum ada peringkat
- Pengantar MekatronikaDokumen21 halamanPengantar MekatronikaUchiya Fade'to BlackBelum ada peringkat
- Tugas Praktek Mekatronika NovitaDokumen11 halamanTugas Praktek Mekatronika NovitaJosua SiagianBelum ada peringkat
- Jawaban Soal Hal 27Dokumen5 halamanJawaban Soal Hal 27Noerfaizi Achmad NicdanatoBelum ada peringkat
- TUGAS MANDIRI SISTEM KONTROl Ibnu UtomoDokumen6 halamanTUGAS MANDIRI SISTEM KONTROl Ibnu UtomoDwi DwiBelum ada peringkat
- Laporan Tugas Akhir Semester MekatronikaDokumen18 halamanLaporan Tugas Akhir Semester MekatronikaAri Dwi ABelum ada peringkat
- Bab 2 PDFDokumen14 halamanBab 2 PDFMuhammad YusrinBelum ada peringkat
- 100 201 1 SMDokumen7 halaman100 201 1 SMahmad ahsanul fikriBelum ada peringkat
- Sistim KendaliDokumen16 halamanSistim Kendaliiqbal_bilbulbelbolBelum ada peringkat
- Coca ColaDokumen8 halamanCoca ColaOuwrye Z ZaBelum ada peringkat
- Materi UTS OtinDokumen68 halamanMateri UTS OtinHusna QotrunnadaBelum ada peringkat
- Tugas 1 Praktek Meka M. Aldinal Fajri 19130051Dokumen6 halamanTugas 1 Praktek Meka M. Aldinal Fajri 19130051Resti YuliaBelum ada peringkat
- M. Aldinal Fajri - Tugas 1 PraktekDokumen6 halamanM. Aldinal Fajri - Tugas 1 PraktekResti YuliaBelum ada peringkat
- Jurnal PneumatikDokumen7 halamanJurnal PneumatikApriliyanto Rahadi PradanaBelum ada peringkat
- Mesin PackagingDokumen8 halamanMesin PackagingWahyu Tri WibowoBelum ada peringkat
- Electric ActuatorDokumen15 halamanElectric Actuatoraswan stBelum ada peringkat
- Automation & Numerical Control Machines Mg6-7presetasi - En.idDokumen218 halamanAutomation & Numerical Control Machines Mg6-7presetasi - En.idNaufal AfifBelum ada peringkat
- Makalah Handling and Sparating Dzakiyy Waliyu Rahman & Hildan FebiantoDokumen14 halamanMakalah Handling and Sparating Dzakiyy Waliyu Rahman & Hildan Febiantodzakiyy waliyu rahmanBelum ada peringkat
- Tugas Mandiri Sistem Kontrol 1 FerdianDokumen6 halamanTugas Mandiri Sistem Kontrol 1 FerdianDwi DwiBelum ada peringkat
- Pneumatik :)Dokumen30 halamanPneumatik :)Rendi HermawanBelum ada peringkat
- Laporan Pratikum Pengendalian Laju AlirDokumen25 halamanLaporan Pratikum Pengendalian Laju AlirTeuku Husein Fahsya50% (2)
- Pengentar Elektro TeknikDokumen11 halamanPengentar Elektro TeknikMuhammad Akmal SyarafiBelum ada peringkat
- Jurnal: Teknik Mesin Untag SurabayaDokumen10 halamanJurnal: Teknik Mesin Untag SurabayaFaridhoBelum ada peringkat
- Prak GensetDokumen8 halamanPrak GensetFebrianto Tandi LilingBelum ada peringkat
- Modul Praktikum Elektro Pneumatik - Fixed - OnieDokumen87 halamanModul Praktikum Elektro Pneumatik - Fixed - OnieHistoire MancizBelum ada peringkat
- Proposal Tata TulisDokumen15 halamanProposal Tata TulisVerry CahyadiBelum ada peringkat
- Mesin Pencacah Cengkeh 1a78e959Dokumen6 halamanMesin Pencacah Cengkeh 1a78e959Kukuh PrastyoBelum ada peringkat
- CengkehDokumen13 halamanCengkehKukuh PrastyoBelum ada peringkat
- Bab Ii Dasar Teori PDFDokumen21 halamanBab Ii Dasar Teori PDFKukuh PrastyoBelum ada peringkat
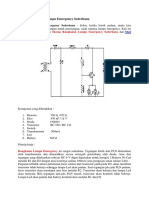
- Lampu EmergencyDokumen1 halamanLampu EmergencyKukuh PrastyoBelum ada peringkat
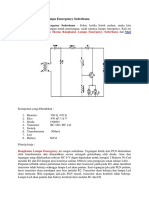
- Lampu EmergencyDokumen1 halamanLampu EmergencyKukuh PrastyoBelum ada peringkat
- Analisa Kekuatan Ramp Plate Untuk LoadouDokumen9 halamanAnalisa Kekuatan Ramp Plate Untuk LoadouKukuh PrastyoBelum ada peringkat
- BearingDokumen8 halamanBearingKukuh PrastyoBelum ada peringkat
- Meningkatkan Mutu Pemeliharaan MesinDokumen7 halamanMeningkatkan Mutu Pemeliharaan MesinKukuh PrastyoBelum ada peringkat