Anda mungkin juga menyukai
- Sistem Jaringan LAN (39Dokumen3 halamanSistem Jaringan LAN (39Elga LaraswatiBelum ada peringkat
- Transformasi-Z RasionalDokumen11 halamanTransformasi-Z RasionalAnnisa RahmadayantiBelum ada peringkat
- Sistem LinearDokumen67 halamanSistem LinearemonBelum ada peringkat
- Metode Numerik Persamaan Akar Kuadrat Menggunakan MatlabDokumen1 halamanMetode Numerik Persamaan Akar Kuadrat Menggunakan MatlabTfk BajaBelum ada peringkat
- Materi Sinyal, Sistem Dan Kontrol 1Dokumen51 halamanMateri Sinyal, Sistem Dan Kontrol 1Fariz Afritzal YushendinataBelum ada peringkat
- KONSEP KONVOLUSIDokumen8 halamanKONSEP KONVOLUSIKiki Putri SisvianaBelum ada peringkat
- FIR Filter Design Using Windowing MethodDokumen20 halamanFIR Filter Design Using Windowing MethodDisty Wisdayani MujibBelum ada peringkat
- OPTIMASIDokumen68 halamanOPTIMASIAfriantoniBelum ada peringkat
- Bahan Ajar III Dan IV Karakterisasi SensorDokumen54 halamanBahan Ajar III Dan IV Karakterisasi Sensorsixtinah deswilan0% (1)
- Jurnal Sensor Suhu Tubuh ArduinoDokumen88 halamanJurnal Sensor Suhu Tubuh ArduinoRadilsha MaharaniBelum ada peringkat
- Transformasi Fourier Dan Penyelesaian PDDokumen8 halamanTransformasi Fourier Dan Penyelesaian PDAan HanievahBelum ada peringkat
- Engineering Electromagnetics 8th Edition William H. Hayt Original (235 241) .En - IdDokumen7 halamanEngineering Electromagnetics 8th Edition William H. Hayt Original (235 241) .En - IddeviBelum ada peringkat
- Lapres Termodinamika P1 (Pemanasan Dan Pendinginan)Dokumen9 halamanLapres Termodinamika P1 (Pemanasan Dan Pendinginan)Aliyya DhiyaBelum ada peringkat
- Rangkaian Sistem MinimumDokumen8 halamanRangkaian Sistem Minimumayu zakiahBelum ada peringkat
- Sistem Pengaturan Ac OtomatisDokumen3 halamanSistem Pengaturan Ac OtomatisYusuf Ady100% (1)
- ENERGI KONVERSIDokumen35 halamanENERGI KONVERSIAnang tegar rivaldyBelum ada peringkat
- GERBANGDokumen9 halamanGERBANGDwi GunawanPutraBelum ada peringkat
- Tuning Kontroler PIDDokumen9 halamanTuning Kontroler PIDchoiozaBelum ada peringkat
- POSK03 M0520044 Latifah HukmaDokumen21 halamanPOSK03 M0520044 Latifah HukmaLatifah Hukma ShobiyyaBelum ada peringkat
- 5-Pendekatan Ruang KeadaanDokumen19 halaman5-Pendekatan Ruang KeadaanAnadya CantikaBelum ada peringkat
- PSWK 1Dokumen64 halamanPSWK 1Aurelliafieldza sendyarthaBelum ada peringkat
- Soal Uts PSWD 2020Dokumen3 halamanSoal Uts PSWD 2020aurelliaBelum ada peringkat
- PWM Dan Serial KomunikasiDokumen23 halamanPWM Dan Serial Komunikasiyunita nur cahyaniBelum ada peringkat
- Jemuran Otomatis Berbasis ArduinoDokumen16 halamanJemuran Otomatis Berbasis ArduinoTiar GymnastiarBelum ada peringkat
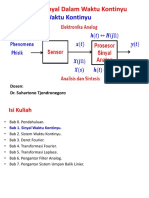
- Sistem Waktu KontinyuDokumen84 halamanSistem Waktu KontinyuTV ScreenBelum ada peringkat
- TEKNIK ELEKTRO FTI-ITSDokumen130 halamanTEKNIK ELEKTRO FTI-ITSDimasAnggriawanSBelum ada peringkat
- Bab V Kestabilan SistemDokumen20 halamanBab V Kestabilan SistemPak TholibBelum ada peringkat
- KODE PROGRAM FUNGSI TRIGONOMETRI DAN EXPONENSIALDokumen76 halamanKODE PROGRAM FUNGSI TRIGONOMETRI DAN EXPONENSIALChandra Aris KusumaBelum ada peringkat
- Tugas Rutin ElektromagnetikDokumen10 halamanTugas Rutin ElektromagnetikMartinBelum ada peringkat
- Sistem Kendali LaplaceDokumen7 halamanSistem Kendali LaplaceMuhammad FahmiBelum ada peringkat
- Arus Perpindahan (Displacement Current)Dokumen10 halamanArus Perpindahan (Displacement Current)MRifqiFadhilahBelum ada peringkat
- Soal Kelompok 3 Persamaan LegendreDokumen1 halamanSoal Kelompok 3 Persamaan LegendreBrigita WowilingBelum ada peringkat
- Tutorial 1 ProbabilitasDokumen4 halamanTutorial 1 ProbabilitasYudit100% (1)
- Sensor Cahaya Adalah Komponen Elektronika Yang DapatDokumen17 halamanSensor Cahaya Adalah Komponen Elektronika Yang DapatRizal FahmiBelum ada peringkat
- KONVOLUSI DISKRITDokumen16 halamanKONVOLUSI DISKRITAhmad Soliqhul AzizBelum ada peringkat
- Ziegler-Nichols PIDDokumen8 halamanZiegler-Nichols PIDsagatoBelum ada peringkat
- EWB RangkaianDokumen19 halamanEWB RangkaianYudha Achmad Al-GhifariBelum ada peringkat
- Pengertian Sistem LinierDokumen18 halamanPengertian Sistem Liniermhafidz49Belum ada peringkat
- KonvolusiSinyalKontinyuDokumen15 halamanKonvolusiSinyalKontinyuSony S WaruwuBelum ada peringkat
- Tugas 6 - Kelompok 2Dokumen5 halamanTugas 6 - Kelompok 2fadhila Nur Aisyah100% (1)
- Full AdderDokumen7 halamanFull AdderwriskyBelum ada peringkat
- Kalkulator Digital Sederhana Sisi Kanan Mikrokontroler Arduino Uno2Dokumen4 halamanKalkulator Digital Sederhana Sisi Kanan Mikrokontroler Arduino Uno2adi nur rohkhimBelum ada peringkat
- Deret Fourier TrigonometriDokumen4 halamanDeret Fourier TrigonometriDini JantikaBelum ada peringkat
- Program Setting Memori Menggunakan LoopDokumen14 halamanProgram Setting Memori Menggunakan LoopfahrulahyarBelum ada peringkat
- KAPASITASIDokumen7 halamanKAPASITASIMartin AritonangBelum ada peringkat
- Analisis Sistem Orde 2 Dengan Massa Pegas Liquid DamperDokumen19 halamanAnalisis Sistem Orde 2 Dengan Massa Pegas Liquid DamperFitra PanduBelum ada peringkat
- Digital CounterDokumen14 halamanDigital CounterAdi YuniarBelum ada peringkat
- Soal Ujian Akhir Semester Uas Elektronika Dasardoc1Dokumen9 halamanSoal Ujian Akhir Semester Uas Elektronika Dasardoc1DevianaRidhaniBelum ada peringkat
- PCM_DASARDokumen3 halamanPCM_DASARIsmu Nagh X-troneBelum ada peringkat
- Sistem Orde DuaDokumen6 halamanSistem Orde Duamei liadianaBelum ada peringkat
- RENCANA PEMBELAJARAN SEMESTER Pengantar Analisis RangkaianDokumen12 halamanRENCANA PEMBELAJARAN SEMESTER Pengantar Analisis RangkaianWinarno MTsN 1 Bandar LampungBelum ada peringkat
- 5c Distribusi Gamma Dan Eksponensial PDFDokumen20 halaman5c Distribusi Gamma Dan Eksponensial PDFDesy RebekkaBelum ada peringkat
- RESPON FUNGSI STEPDokumen24 halamanRESPON FUNGSI STEPjojor simamora0% (1)
- Makalah Proyek Rangkaian ElektronikaDokumen15 halamanMakalah Proyek Rangkaian ElektronikaJonathan Martin Limbong100% (1)
- Tubes - Siskon B - Kelompok 3Dokumen16 halamanTubes - Siskon B - Kelompok 3Zufar Yusuf Putra ViandhiBelum ada peringkat
- Modul 2 - ApraktikumDokumen9 halamanModul 2 - Apraktikumnur diyantoBelum ada peringkat
- Listing Simulasi MatlabDokumen90 halamanListing Simulasi MatlabRico AfrinandoBelum ada peringkat
- Fandi Prayoga Efendi 1820201056 A1 S6 Jawaban Uas Pemodelan Sistem DinamikDokumen12 halamanFandi Prayoga Efendi 1820201056 A1 S6 Jawaban Uas Pemodelan Sistem DinamikFandi Punk DzatieBelum ada peringkat
- STC PID SKA Ibnu Ghani Rafiansyah 205060307111037Dokumen11 halamanSTC PID SKA Ibnu Ghani Rafiansyah 205060307111037Adiel RaihanBelum ada peringkat
- Respon PIDDokumen4 halamanRespon PIDMuhammad AzzamBelum ada peringkat
- Alat Pengukur Suhu Digital Berbasis Atmega 32Dokumen11 halamanAlat Pengukur Suhu Digital Berbasis Atmega 32himawanBelum ada peringkat
- Rundown Acara Stadium General PMW PNP 2022Dokumen1 halamanRundown Acara Stadium General PMW PNP 2022Muhammad AzzamBelum ada peringkat
- Spanduk Lanskap Kembali Beroperasi Salon Pastel Merah Muda Periwinkle Dan PutihDokumen1 halamanSpanduk Lanskap Kembali Beroperasi Salon Pastel Merah Muda Periwinkle Dan PutihMuhammad AzzamBelum ada peringkat
- Karakteristik Trafo 3 FasaDokumen24 halamanKarakteristik Trafo 3 FasaMuhammad AzzamBelum ada peringkat
- Tugas Resume Video Transformator - Rheza Vichry Hidayat - 2009Dokumen1 halamanTugas Resume Video Transformator - Rheza Vichry Hidayat - 2009Muhammad AzzamBelum ada peringkat
- Buku - PKN - Dikti 2016Dokumen342 halamanBuku - PKN - Dikti 2016asma100% (1)
- Belum Ikut Ujian LiaDokumen1 halamanBelum Ikut Ujian LiaMuhammad AzzamBelum ada peringkat
- RAB Baju Kepengurusan ForkoDokumen2 halamanRAB Baju Kepengurusan ForkoMuhammad AzzamBelum ada peringkat
- Soal Uts MPDokumen2 halamanSoal Uts MPMuhammad AzzamBelum ada peringkat
- Pengenalan MatlabDokumen8 halamanPengenalan MatlabMuhammad AzzamBelum ada peringkat
- JOB SHEET Praktek Kontrol Industri Lanjutan - Pump - StationDokumen39 halamanJOB SHEET Praktek Kontrol Industri Lanjutan - Pump - StationSolihinBelum ada peringkat
- HiguufuysyatsydkglglfududufifdidiDokumen16 halamanHiguufuysyatsydkglglfududufifdidiMuhammad AzzamBelum ada peringkat
- Mahasiswa Yg Belum SDG PKLDokumen1 halamanMahasiswa Yg Belum SDG PKLMuhammad AzzamBelum ada peringkat
- CARAKEMBALIDokumen2 halamanCARAKEMBALIBumi Harmoni IndogunaBelum ada peringkat
- Hallo Listrik Optimalkan PersaudaraanDokumen2 halamanHallo Listrik Optimalkan PersaudaraanMuhammad AzzamBelum ada peringkat
- OPTIMASI DOKUMEN PROYEKDokumen17 halamanOPTIMASI DOKUMEN PROYEKMuhammad AzzamBelum ada peringkat
- Kalimat Efektif: Bahasa IndonesiaDokumen10 halamanKalimat Efektif: Bahasa IndonesiaMuhammad AzzamBelum ada peringkat
- Job Sheet 1Dokumen5 halamanJob Sheet 1Tiara Tirta AzizahBelum ada peringkat
- Pedoman Umum Pembentukan Istilah (PBN)Dokumen65 halamanPedoman Umum Pembentukan Istilah (PBN)SNT van Ophujsen100% (2)
- Id 1Dokumen10 halamanId 1Muhammad AzzamBelum ada peringkat
- ISTILAH BAHASADokumen8 halamanISTILAH BAHASAMuhammad AzzamBelum ada peringkat
- MABB 3 PhasaDokumen5 halamanMABB 3 PhasaMuhammad AzzamBelum ada peringkat
- UNTUK TUGAS LISTRIKDokumen10 halamanUNTUK TUGAS LISTRIKMuhammad AzzamBelum ada peringkat
- Pedoman Umum Ejaan Bahasa Indonesia (PUEBI)Dokumen92 halamanPedoman Umum Ejaan Bahasa Indonesia (PUEBI)dayatdaychoBelum ada peringkat
- Kalimat Efektif-1Dokumen19 halamanKalimat Efektif-1Muhammad AzzamBelum ada peringkat
- Muhammad Azzam - 1901031022 - TUGAS IIDokumen10 halamanMuhammad Azzam - 1901031022 - TUGAS IIMuhammad AzzamBelum ada peringkat
- TUGAS III-dikonversiDokumen9 halamanTUGAS III-dikonversiMuhammad AzzamBelum ada peringkat
- UNTUK TUGAS LISTRIKDokumen10 halamanUNTUK TUGAS LISTRIKMuhammad AzzamBelum ada peringkat