Anda mungkin juga menyukai
- UREADokumen14 halamanUREAhapsariindreyBelum ada peringkat
- MINYAKDokumen17 halamanMINYAKWiti EkasariBelum ada peringkat
- Ahmad Irvan PT BKPDokumen67 halamanAhmad Irvan PT BKPAhmadIrvan100% (2)
- Reaktor Heterogen untuk Reaksi KimiaDokumen7 halamanReaktor Heterogen untuk Reaksi KimiaKhoiriyahBelum ada peringkat
- Evaluasi Performance Heat Exchanger 11E-25 CDU 1 (Crude-DikonversiDokumen103 halamanEvaluasi Performance Heat Exchanger 11E-25 CDU 1 (Crude-DikonversiiMARAdesuBelum ada peringkat
- BAB I PENDAHULUAN 1.1 Latar Belakang Prinsip Kerja Recovery BoilerDokumen51 halamanBAB I PENDAHULUAN 1.1 Latar Belakang Prinsip Kerja Recovery BoilerElza Febrianty AngrainiBelum ada peringkat
- Alkilasi, Polimerisasi Dan IsomerisasiDokumen12 halamanAlkilasi, Polimerisasi Dan IsomerisasiAnisa NovitaSharyie Csls100% (1)
- Utilitas - Kelompok 1Dokumen7 halamanUtilitas - Kelompok 1Bilqis Nur FadhilahBelum ada peringkat
- SiklusOttoDokumen2 halamanSiklusOttoSinggih MahardikaBelum ada peringkat
- Optimasi Sistem Energi (Klp. 1)Dokumen17 halamanOptimasi Sistem Energi (Klp. 1)Ayuni LestariBelum ada peringkat
- Makalah ReboilerDokumen25 halamanMakalah ReboilerNurul KomariahBelum ada peringkat
- PERENGKAHAN KATALISDokumen13 halamanPERENGKAHAN KATALISM. Janatun NaimBelum ada peringkat
- Jenis RefrigeranDokumen15 halamanJenis RefrigeranAldila Rindika WBelum ada peringkat
- Otk 2Dokumen39 halamanOtk 2ElnovistaBelum ada peringkat
- DOUBLE PIPE EXCHANGER PPT JekaDokumen26 halamanDOUBLE PIPE EXCHANGER PPT JekaJekasyah PermadiBelum ada peringkat
- 5.distilasi BertekananDokumen12 halaman5.distilasi BertekananCharen TutkeyBelum ada peringkat
- Laporan Kandungan Air Boiler 2A FixDokumen5 halamanLaporan Kandungan Air Boiler 2A FixAghin AsrofiBelum ada peringkat
- Heat Exchanger PAP I - Kelompok2 (A2)Dokumen20 halamanHeat Exchanger PAP I - Kelompok2 (A2)Thahtia RahmaBelum ada peringkat
- Bahan Ajar TermodinamikaDokumen171 halamanBahan Ajar Termodinamikanurullqalby0% (1)
- Makalah UtilitasDokumen102 halamanMakalah UtilitasMerrison AkhzulBelum ada peringkat
- REAKSI DI FCCDokumen41 halamanREAKSI DI FCCXkaitozezeBelum ada peringkat
- Makalah Turbin UapDokumen25 halamanMakalah Turbin UapApri YansyahBelum ada peringkat
- Alkilasi KatalisDokumen11 halamanAlkilasi KatalisValencia Darmawan HBelum ada peringkat
- Yusup M.M.I 16030054 Aplikasi Heat Exchanger Tipe Double Pipe Dalam IndustriDokumen9 halamanYusup M.M.I 16030054 Aplikasi Heat Exchanger Tipe Double Pipe Dalam IndustriYusup MaulanaBelum ada peringkat
- Utilitas - Steam - Universitas DiponegoroDokumen29 halamanUtilitas - Steam - Universitas DiponegoroAbdulWasiBelum ada peringkat
- Bab I Pendahuluan 1.1. Latar Belakang: Acid (SPKOFA) Akan Keluar Dari Bagian Atas Kolom Splitting Dan SweetDokumen41 halamanBab I Pendahuluan 1.1. Latar Belakang: Acid (SPKOFA) Akan Keluar Dari Bagian Atas Kolom Splitting Dan SweetHasbi SamosirBelum ada peringkat
- Reaktor KimiaDokumen17 halamanReaktor KimiaRandy Surya KusumahBelum ada peringkat
- Bahan Bakar & Sistem PembakaranDokumen27 halamanBahan Bakar & Sistem PembakaranSholihin Syah PutraBelum ada peringkat
- Proses Pembuatan LNGDokumen2 halamanProses Pembuatan LNGMuhamad Maulanal HaqBelum ada peringkat
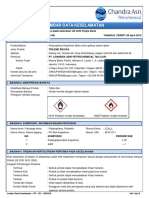
- Lembar Data Keselamatan Chandra Asri Sds Indopp Efek Kesehatan Di BawahDokumen4 halamanLembar Data Keselamatan Chandra Asri Sds Indopp Efek Kesehatan Di BawahAhmad MBelum ada peringkat
- TEKNOLOGI PENGOLAHAN LIMBAH CAIR PT PUSRIDokumen23 halamanTEKNOLOGI PENGOLAHAN LIMBAH CAIR PT PUSRIAyu SriwahyuniBelum ada peringkat
- Optimasi Proses Konversi Acetylene Menjadi EtilenaDokumen2 halamanOptimasi Proses Konversi Acetylene Menjadi EtilenaAgus TriaBelum ada peringkat
- Tugas KompresorDokumen4 halamanTugas KompresorMeysa NadiaBelum ada peringkat
- Pengertian Dan Prinsip Kerja Sensor RTDDokumen7 halamanPengertian Dan Prinsip Kerja Sensor RTDAldino ManakoBelum ada peringkat
- Tugas 1 OTK Plug Valve Kelompok 5Dokumen13 halamanTugas 1 OTK Plug Valve Kelompok 5Herman Syah TriBelum ada peringkat
- Pendingin Di IndustriDokumen6 halamanPendingin Di IndustriakitakiaBelum ada peringkat
- Siklus Brayton Pada Turbin GasDokumen10 halamanSiklus Brayton Pada Turbin GasTri Yuniarto100% (1)
- Syaiful Efendi PPT TurbinDokumen12 halamanSyaiful Efendi PPT TurbinSyaiful EfendiBelum ada peringkat
- Kuliah 09-10 Hukum II TermodinamikaDokumen26 halamanKuliah 09-10 Hukum II TermodinamikaVAYEFBelum ada peringkat
- Perancangan Sistem Pada Alat Falling Film Evaporator Menggunakan Sistem RefrigerasiDokumen14 halamanPerancangan Sistem Pada Alat Falling Film Evaporator Menggunakan Sistem RefrigerasiMuhamad Rizki Agil P. (Egi)Belum ada peringkat
- BAB 10 - Proses-Proses PemurnianDokumen23 halamanBAB 10 - Proses-Proses PemurnianFebriBelum ada peringkat
- IsomerisasiDokumen13 halamanIsomerisasiFikri Haikal PrasetyoBelum ada peringkat
- U-Tube HEAT EXCHANGERDokumen6 halamanU-Tube HEAT EXCHANGERRizki GumelarBelum ada peringkat
- AIat OrsatDokumen2 halamanAIat OrsatAmadea Vania50% (2)
- KonduksiDokumen15 halamanKonduksiRicky MierzatBelum ada peringkat
- Charge Air SysDokumen37 halamanCharge Air Sysiqha iqho100% (1)
- TK SaponifikasiDokumen7 halamanTK SaponifikasillllaaaBelum ada peringkat
- BAB I ReboilerDokumen2 halamanBAB I ReboilerBayu D-scyzorBelum ada peringkat
- Sistem Air Pendingin FixDokumen30 halamanSistem Air Pendingin FixElvera MarlianiBelum ada peringkat
- Bab 10 - Pengukuran Aliran FluidaDokumen16 halamanBab 10 - Pengukuran Aliran FluidaArismon SaputraBelum ada peringkat
- Jacketed Vessel With Coil and StirrerDokumen3 halamanJacketed Vessel With Coil and StirrerfannyBelum ada peringkat
- Mencegah Surging KompresorDokumen3 halamanMencegah Surging KompresorAisyah SavitriBelum ada peringkat
- Prinsip Kerja Cooling TowerDokumen29 halamanPrinsip Kerja Cooling TowerSt Joni Satrio100% (3)
- Efisiensi BoilerDokumen20 halamanEfisiensi BoilerBahar Agus KurniawanBelum ada peringkat
- Aplikasi Teori Renewal Dalam Model Penggantian MesinDokumen23 halamanAplikasi Teori Renewal Dalam Model Penggantian MesinDheeka Hani SoerosoBelum ada peringkat
- Perpindahan Panas 1Dokumen45 halamanPerpindahan Panas 1Vike YuniasriBelum ada peringkat
- BAB II Konduksi - 22Dokumen29 halamanBAB II Konduksi - 22Faizzul haq 324Belum ada peringkat
- Perpindahan Panas Molekuler (Konduksi) Steady State Multi DimensiDokumen24 halamanPerpindahan Panas Molekuler (Konduksi) Steady State Multi DimensiSetiya EkoBelum ada peringkat
- HEAT EXCHANGERDokumen13 halamanHEAT EXCHANGERFrendy RianBelum ada peringkat
- Terbesar Dan MuliaDokumen1 halamanTerbesar Dan MuliaDaniel YonathanBelum ada peringkat
- Titik Rawan Mobilitas Dalam Masa PPKM Darurat - 04072021Dokumen2 halamanTitik Rawan Mobilitas Dalam Masa PPKM Darurat - 04072021Daniel YonathanBelum ada peringkat
- Titik Rawan Mobilitas Dalam Masa PPKM Darurat - 04072021Dokumen2 halamanTitik Rawan Mobilitas Dalam Masa PPKM Darurat - 04072021Daniel YonathanBelum ada peringkat
- Soal Jenis-Jenis Akar Persamaan KuadratDokumen2 halamanSoal Jenis-Jenis Akar Persamaan KuadratDaniel YonathanBelum ada peringkat
- Hara PankuDokumen1 halamanHara PankuDaniel YonathanBelum ada peringkat
- BiodieselDokumen58 halamanBiodieselDaniel YonathanBelum ada peringkat
- SPLTVDokumen14 halamanSPLTVDendi Sanjaya70% (20)
- Les 1Dokumen6 halamanLes 1Daniel YonathanBelum ada peringkat
- Minyak JarakDokumen15 halamanMinyak JarakDaniel YonathanBelum ada peringkat
- Media 1360 26Dokumen23 halamanMedia 1360 26Daniel YonathanBelum ada peringkat
- Minyak ZaitunDokumen24 halamanMinyak ZaitunDaniel YonathanBelum ada peringkat
- Positif TingkingDokumen5 halamanPositif TingkingDaniel YonathanBelum ada peringkat
- Profile Industri Oleokimia 2014Dokumen27 halamanProfile Industri Oleokimia 2014Ibnu AsyamsBelum ada peringkat
- Ekstraksi Olive OilDokumen2 halamanEkstraksi Olive OilDaniel YonathanBelum ada peringkat
- Minyak Lemak Umum PDFDokumen51 halamanMinyak Lemak Umum PDFDaniel YonathanBelum ada peringkat
- Profile Industri Oleokimia 2014Dokumen27 halamanProfile Industri Oleokimia 2014Ibnu AsyamsBelum ada peringkat
- USU RancangDokumen309 halamanUSU RancangDaniel YonathanBelum ada peringkat
- AprosDokumen7 halamanAprosDaniel YonathanBelum ada peringkat
- Sensitivity Analysis 2014Dokumen4 halamanSensitivity Analysis 2014Daniel YonathanBelum ada peringkat
- Time Value of Money R3Dokumen14 halamanTime Value of Money R3Daniel YonathanBelum ada peringkat
- Takut Akan TuhanDokumen8 halamanTakut Akan TuhanDaniel Yonathan100% (1)
- SPONGDokumen8 halamanSPONGDaniel YonathanBelum ada peringkat
- Bahan 13b Studi Kelayakan 2003Dokumen6 halamanBahan 13b Studi Kelayakan 2003Daniel YonathanBelum ada peringkat
- Capital Budgeting R7 2015Dokumen50 halamanCapital Budgeting R7 2015Daniel YonathanBelum ada peringkat
- AgamaDokumen7 halamanAgamaDaniel YonathanBelum ada peringkat
- BAB III Karakter RemajaDokumen7 halamanBAB III Karakter RemajaDaniel YonathanBelum ada peringkat
- BERPIKIR KRITIS & KreatifDokumen7 halamanBERPIKIR KRITIS & KreatifDaniel YonathanBelum ada peringkat
- SPONGDokumen8 halamanSPONGDaniel YonathanBelum ada peringkat
- Bacteria and Human Life-BillyDokumen12 halamanBacteria and Human Life-BillyDaniel YonathanBelum ada peringkat