Anda mungkin juga menyukai
- Mesin - Mesin ListrikDokumen61 halamanMesin - Mesin Listrikmbloex100% (1)
- Variable Speed DriveDokumen9 halamanVariable Speed DriveKarunia Ratna Istiqlal100% (1)
- Pengendalian Motor DC Dengan Metode PWMDokumen15 halamanPengendalian Motor DC Dengan Metode PWMMeutia RahmahBelum ada peringkat
- Resume Terkait Electric DriveDokumen7 halamanResume Terkait Electric DrivePreabiopiBelum ada peringkat
- JadiDokumen6 halamanJadiDzakyHilmyAsfeBelum ada peringkat
- Pengereman RegeneratifDokumen6 halamanPengereman RegeneratifWindy AnjeliBelum ada peringkat
- DImas Priyuko Tri Asmoro - 2003035032 - PPT 2 - OTOMASI INDUSTRI 6ADokumen38 halamanDImas Priyuko Tri Asmoro - 2003035032 - PPT 2 - OTOMASI INDUSTRI 6AAbdul RozaqBelum ada peringkat
- Motor UniversalDokumen12 halamanMotor Universaldiaznanda19Belum ada peringkat
- DImas Priyuko Tri Asmoro - 2003035032 - PPT 2 - OTOMASI INDUSTRI 6ADokumen38 halamanDImas Priyuko Tri Asmoro - 2003035032 - PPT 2 - OTOMASI INDUSTRI 6AAbdul RozaqBelum ada peringkat
- MENGOPTIMALKAN SPESIFIKASI MOTOR LISTRIKDokumen12 halamanMENGOPTIMALKAN SPESIFIKASI MOTOR LISTRIKmokonBelum ada peringkat
- Tegangan Statis Dan Frekuensi StatisDokumen4 halamanTegangan Statis Dan Frekuensi StatisDio Andhika FernandaBelum ada peringkat
- Kisi-Kisi Mesin Listrik DCDokumen8 halamanKisi-Kisi Mesin Listrik DCIdham WahyudiBelum ada peringkat
- Tugas Roynaldi Sunil Saputra 18064071Dokumen9 halamanTugas Roynaldi Sunil Saputra 18064071Roynaldi ToexmoeBelum ada peringkat
- CJR Mesin AcDokumen17 halamanCJR Mesin AcAvner ChristianBelum ada peringkat
- KARAKTERISTIK MOTORDokumen10 halamanKARAKTERISTIK MOTORApis MuliaBelum ada peringkat
- file ppt klp 1 matrixDokumen16 halamanfile ppt klp 1 matrix21 042 ESTEFANUS TANDI GEGOBelum ada peringkat
- Tutam - Module89 - Syahriza Malika YahyaDokumen9 halamanTutam - Module89 - Syahriza Malika YahyaSyahriza MalikBelum ada peringkat
- 4027 Motor UniversalDokumen3 halaman4027 Motor UniversalAnargya WidyatamaBelum ada peringkat
- Motor Listrik Merupakan Perangkat Yang Bekerja Menghasilkan Gerak BerputarDokumen6 halamanMotor Listrik Merupakan Perangkat Yang Bekerja Menghasilkan Gerak BerputarIsmu Nagh X-troneBelum ada peringkat
- Pengaturan Kecepatan Motor InduksiDokumen20 halamanPengaturan Kecepatan Motor InduksiMiftahul KhoirBelum ada peringkat
- OPTIMALISASI INVERTERDokumen25 halamanOPTIMALISASI INVERTERSyi Fha100% (1)
- SynchronisationDokumen6 halamanSynchronisationAugy HaerudyBelum ada peringkat
- Journal TDL Wps Office 1Dokumen14 halamanJournal TDL Wps Office 1Alfi FahrurroziBelum ada peringkat
- Motor atDokumen6 halamanMotor atMuhd Muhd HasifBelum ada peringkat
- CraneDokumen8 halamanCranerudielektroBelum ada peringkat
- Afifah Zahwa Azzahara (20130070) Tugas 4 Kendali Mesin ListrikDokumen11 halamanAfifah Zahwa Azzahara (20130070) Tugas 4 Kendali Mesin ListrikWindy AnjeliBelum ada peringkat
- Tugas Resume Pengendalian Motor BDokumen4 halamanTugas Resume Pengendalian Motor BKevin M TandisauBelum ada peringkat
- Pengoprasian ElevatorDokumen12 halamanPengoprasian ElevatorYutub PertamaxBelum ada peringkat
- Aplikasi Motor Listrik Pada Sistem ConveyorDokumen13 halamanAplikasi Motor Listrik Pada Sistem ConveyorFeri Krismanto100% (2)
- Tugas Rangkuman Mesin-Mesin Listrik (Muhammad Yasin Haeruddin-105821104417)Dokumen3 halamanTugas Rangkuman Mesin-Mesin Listrik (Muhammad Yasin Haeruddin-105821104417)alfiyani bakriBelum ada peringkat
- CJR Mesin DCDokumen12 halamanCJR Mesin DCAvner ChristianBelum ada peringkat
- Makalah Bab 8Dokumen26 halamanMakalah Bab 8ICHSAN MURTADLOBelum ada peringkat
- Ward Leonard Drive SystemDokumen3 halamanWard Leonard Drive SystemGrimy RustyBelum ada peringkat
- 01 Pengantar Sistem Penggerak Listrik PDFDokumen47 halaman01 Pengantar Sistem Penggerak Listrik PDFHelka BaktĭBelum ada peringkat
- OPTIMASI PARAMETER SMC MENGGUNAKAN AG UNTUK PENGATURAN KECEPATAN MOTOR INDUKSIDokumen27 halamanOPTIMASI PARAMETER SMC MENGGUNAKAN AG UNTUK PENGATURAN KECEPATAN MOTOR INDUKSIWahyu SyahrirBelum ada peringkat
- Mesin Listrik...Dokumen19 halamanMesin Listrik...henggeloke112Belum ada peringkat
- Dinamika Penggerak ListrikDokumen35 halamanDinamika Penggerak Listrikalfari 233Belum ada peringkat
- Ps - 4b2 - Bimo Agressianto - (Untuk Print Screen Eprint)Dokumen4 halamanPs - 4b2 - Bimo Agressianto - (Untuk Print Screen Eprint)Muhammad Rifky PratamaBelum ada peringkat
- 4902 5855 2 PBDokumen10 halaman4902 5855 2 PBSyauqi .tsabitaBelum ada peringkat
- Das Teori (Recovered)Dokumen8 halamanDas Teori (Recovered)Kukuh AinoBelum ada peringkat
- SEIG-OVERVIEWDokumen7 halamanSEIG-OVERVIEWVivin ViolitaBelum ada peringkat
- Jurnal InduksiDokumen9 halamanJurnal InduksiFerdinand HartantoBelum ada peringkat
- Aktuator 1Dokumen10 halamanAktuator 1Aldi AlfariziBelum ada peringkat
- Pengaturan Kecepatan Motor Induksi DG Variasi Tegangan Dan Frekuensi Berbasis MikrokontrollerDokumen6 halamanPengaturan Kecepatan Motor Induksi DG Variasi Tegangan Dan Frekuensi Berbasis MikrokontrollerPatrick StarFishBelum ada peringkat
- Word PresentasiDokumen13 halamanWord Presentasiannisa tishanaBelum ada peringkat
- MOTOR3FASADokumen20 halamanMOTOR3FASAikaBelum ada peringkat
- KONTROL CRANEDokumen12 halamanKONTROL CRANERandistya FahmyBelum ada peringkat
- OPTIMASI KEUNTUNGAN MENGGUNAKAN INVERTERDokumen5 halamanOPTIMASI KEUNTUNGAN MENGGUNAKAN INVERTERAdi Leave Tamanan100% (1)
- Pemodelan Dan SimulasiDokumen14 halamanPemodelan Dan SimulasiYuda MartinzBelum ada peringkat
- Energi ListrikDokumen10 halamanEnergi ListrikPanji DayatBelum ada peringkat
- PDF Perawatan Motor Listrikdocx - CompressDokumen17 halamanPDF Perawatan Motor Listrikdocx - CompressyudhoBelum ada peringkat
- Paper Pengemudian Motor ListrikDokumen4 halamanPaper Pengemudian Motor ListrikAilsa NabilahBelum ada peringkat
- Tugas 1 Kendali Mesin Listrik - Yuni Andriva Putri - 20130069Dokumen6 halamanTugas 1 Kendali Mesin Listrik - Yuni Andriva Putri - 20130069Vandy DpBelum ada peringkat
- Quiz PPML - Simon Jansen Saragi Sitio - 062001900012Dokumen14 halamanQuiz PPML - Simon Jansen Saragi Sitio - 062001900012Simon Jansen Saragi SitioBelum ada peringkat
- Presentasi Elda Dalam Industri Kelompok 3Dokumen27 halamanPresentasi Elda Dalam Industri Kelompok 3ErwinFebriyantoBelum ada peringkat
- GENERATOR SINKRONDokumen8 halamanGENERATOR SINKRONAnugrah ImanuelBelum ada peringkat
- MOTOR LISTRIK SEBAGAI PENGGUNA ENERGI UTAMADokumen59 halamanMOTOR LISTRIK SEBAGAI PENGGUNA ENERGI UTAMAAchmad FadhlyBelum ada peringkat
- MOTOR DCDokumen7 halamanMOTOR DCPudanIndraeJr.Belum ada peringkat
- 2887 8903 1 PBDokumen10 halaman2887 8903 1 PBFatimah TunnadaBelum ada peringkat
- Pengajuan Publikasi PDFDokumen20 halamanPengajuan Publikasi PDFIndah PrivatBelum ada peringkat
- Bab 1 Sinyal DasarDokumen49 halamanBab 1 Sinyal DasarAgoeng Berani SmsBelum ada peringkat
- Paralel Trafo Satu-fasaDokumen18 halamanParalel Trafo Satu-fasaZaki YuandaBelum ada peringkat
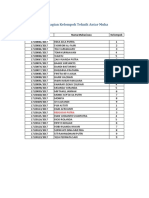
- Pembagian Kelompok Teknik Antar Muka MahasiswaDokumen1 halamanPembagian Kelompok Teknik Antar Muka MahasiswaZaki YuandaBelum ada peringkat
- ID Model Uji Kompetensi Keahlian InstalasiDokumen14 halamanID Model Uji Kompetensi Keahlian InstalasiRyan DinataBelum ada peringkat
- Modul 2 Mesin Listrik 2Dokumen6 halamanModul 2 Mesin Listrik 2FAHMIHIDAYATBelum ada peringkat
- PKM GT Pemanfaatan Ekstrak Nikotin2Dokumen20 halamanPKM GT Pemanfaatan Ekstrak Nikotin2wijayadaniBelum ada peringkat
- Pengumuman Cpns Kemsos 2018Dokumen11 halamanPengumuman Cpns Kemsos 2018John Watiman LakbokBelum ada peringkat
- Tabel Biaya Studi1Dokumen2 halamanTabel Biaya Studi1daniel sitompulBelum ada peringkat
- 3 Rokok 7882-14608-1-PBDokumen9 halaman3 Rokok 7882-14608-1-PBMumutBelum ada peringkat
- MODUL PENGOLAHAN SINYAL DIGITALDokumen163 halamanMODUL PENGOLAHAN SINYAL DIGITALkhairul amri siregarBelum ada peringkat
- RokokDokumen8 halamanRokoklaluviskasBelum ada peringkat
- BAB III IntegrasiDokumen26 halamanBAB III Integrasiaisyahcraft100% (1)
- Efektifitas Limbah Rokok SebagDokumen16 halamanEfektifitas Limbah Rokok SebagFitri AyuBelum ada peringkat
- SK Penetapan Hasil SNMPTN Unand 2018Dokumen36 halamanSK Penetapan Hasil SNMPTN Unand 2018Zacky Aulia MursiBelum ada peringkat
- Ml1 Tr11 Pengaturan-Kecepatan1Dokumen9 halamanMl1 Tr11 Pengaturan-Kecepatan1Hadi AnsyahBelum ada peringkat
- Prak SinyalSistem 2Dokumen13 halamanPrak SinyalSistem 2Chairul AzmiBelum ada peringkat
- Teorema Norton: Pertemuan XDokumen7 halamanTeorema Norton: Pertemuan XMuhammad RohfadliBelum ada peringkat
- 2745 InaDokumen1 halaman2745 InaZaki YuandaBelum ada peringkat
- 122 258 1 SMDokumen8 halaman122 258 1 SMFajar RahmatBelum ada peringkat
- Login Di Http://webmail - Unp.ac - Id 2. Setelah Memasukkan Email Dan Password, Anda Akan Menjumpai Halaman Di Bawah Ini, Kemudian Klik AcceptDokumen8 halamanLogin Di Http://webmail - Unp.ac - Id 2. Setelah Memasukkan Email Dan Password, Anda Akan Menjumpai Halaman Di Bawah Ini, Kemudian Klik AcceptHimmalatul AslamiBelum ada peringkat
- Wiring TeguhDokumen2 halamanWiring TeguhZaki YuandaBelum ada peringkat
- Transformasi Delta BintangDokumen4 halamanTransformasi Delta BintangAhmad Husnul HuluqBelum ada peringkat
- 1184 107563 1 PBDokumen7 halaman1184 107563 1 PBLeo SmartBelum ada peringkat
- Teorema Thevenin: Pertemuan IxDokumen0 halamanTeorema Thevenin: Pertemuan IxIkhrom WicaksonoBelum ada peringkat
- Wiring RickiDokumen2 halamanWiring RickiZaki YuandaBelum ada peringkat