Anda mungkin juga menyukai
- MAKALAH Instrumen Kontrol Kelompok 4Dokumen11 halamanMAKALAH Instrumen Kontrol Kelompok 4SelvianaBelum ada peringkat
- Tugas 03 - Adjie SatrioDokumen5 halamanTugas 03 - Adjie SatrioAdjie satrioBelum ada peringkat
- Fitria - 152110983039 - Instrumentasi Industri 3 PDFDokumen2 halamanFitria - 152110983039 - Instrumentasi Industri 3 PDFFitria NoviaBelum ada peringkat
- Bahan 1 Pengendalian ProsesDokumen58 halamanBahan 1 Pengendalian Prosesanu anuBelum ada peringkat
- Pengendalian Proses - Pertemuan 1Dokumen31 halamanPengendalian Proses - Pertemuan 1Aria Henry HaidarBelum ada peringkat
- Pengenalan Prose KontrolDokumen10 halamanPengenalan Prose KontrolMuhammad SandikaBelum ada peringkat
- RangkumanDokumen3 halamanRangkumanTrisnoRezpectorXWunguIIBelum ada peringkat
- Process Control Pengendalian InstrumentasiDokumen135 halamanProcess Control Pengendalian InstrumentasiEsterBelum ada peringkat
- Laporan Lengkap TCDokumen19 halamanLaporan Lengkap TCAdytia PratamaBelum ada peringkat
- Proses PengendalianDokumen2 halamanProses PengendalianFionna TamaraBelum ada peringkat
- Sistem Kontrol ProduksiDokumen8 halamanSistem Kontrol ProduksiMustaufiqohBelum ada peringkat
- Fundamental Pengendalian ProsesDokumen21 halamanFundamental Pengendalian ProsesFilipi OrlandoBelum ada peringkat
- Heat Exchanger Kontrol Proses, Hatim, Ahwal, FaridDokumen9 halamanHeat Exchanger Kontrol Proses, Hatim, Ahwal, FaridRipqi MuhammadBelum ada peringkat
- Muhammad Saiid - TLI 3B - Tugas 3 Sistem KendaliDokumen9 halamanMuhammad Saiid - TLI 3B - Tugas 3 Sistem KendaliSaiidBelum ada peringkat
- Model Input-Output Dari Tangki Panas BerpengadukDokumen5 halamanModel Input-Output Dari Tangki Panas BerpengadukFakhrizalLaBlaugranaBelum ada peringkat
- InsrumenDokumen13 halamanInsrumenYourdan WijayaBelum ada peringkat
- Praktikum Kontrol Level Dan Suhu Air Dengan Pid ControllerDokumen16 halamanPraktikum Kontrol Level Dan Suhu Air Dengan Pid ControllerSitaHifdiahMaulidiniBelum ada peringkat
- Pengertian Sistem KontrolDokumen10 halamanPengertian Sistem KontrolMadina AnnanisaBelum ada peringkat
- Laporan Temperature Kontrol Kelompok 6 4BS1 Rev 2Dokumen26 halamanLaporan Temperature Kontrol Kelompok 6 4BS1 Rev 2GamerzZExPBelum ada peringkat
- Laporan Praktikum Pengendalian SuhuDokumen19 halamanLaporan Praktikum Pengendalian SuhuSifa Fuzi Allawiyah100% (1)
- Modul 1 Kendali ProsesDokumen24 halamanModul 1 Kendali ProsesRicky JanuardiBelum ada peringkat
- FPPDokumen22 halamanFPPSandy NovisaBelum ada peringkat
- Pengendalian Laju Alir KLP 1Dokumen15 halamanPengendalian Laju Alir KLP 1rezkinugrohoBelum ada peringkat
- Laporan Pengendalian Proses (Temperature Controller)Dokumen31 halamanLaporan Pengendalian Proses (Temperature Controller)wahyunibachtiar0% (1)
- Level Kontrol MakalahDokumen32 halamanLevel Kontrol MakalahZakki Risyadi MuhammadBelum ada peringkat
- Pengendalian ProsesDokumen73 halamanPengendalian ProsesYusuf MahardikaBelum ada peringkat
- Makalah Abdul Dan ArgaDokumen20 halamanMakalah Abdul Dan ArgaEricx ArgaBelum ada peringkat
- Konsep Dasar Kendali 1630986141Dokumen12 halamanKonsep Dasar Kendali 1630986141Bagus SetiawanBelum ada peringkat
- Teori Dasar Sistem PengendalianDokumen32 halamanTeori Dasar Sistem PengendalianAchmad Nizar ZulmiBelum ada peringkat
- Laporan Temperature Kontrol Kelompok 6 4BS1 Rev 2Dokumen26 halamanLaporan Temperature Kontrol Kelompok 6 4BS1 Rev 2GamerzZExPBelum ada peringkat
- Fundamental Pengendalian Proses (Rev-3 2020)Dokumen23 halamanFundamental Pengendalian Proses (Rev-3 2020)Syaeful IkhsanBelum ada peringkat
- Sistem Pengendalian FlowDokumen7 halamanSistem Pengendalian FlowBad GrandpaBelum ada peringkat
- Laporan Resmi Praktikum Simulasi Proses BasicDokumen73 halamanLaporan Resmi Praktikum Simulasi Proses BasicJared Sullivan100% (1)
- MohdMaheshaHafizhAthaya Tugas 2Dokumen7 halamanMohdMaheshaHafizhAthaya Tugas 2Naufal SkaBelum ada peringkat
- Laporan Flow Control (Pak Ramli) Yang FixDokumen22 halamanLaporan Flow Control (Pak Ramli) Yang Fixnovialesty100% (1)
- BAB VI An BalikDokumen30 halamanBAB VI An BalikPragasti Nilam SariBelum ada peringkat
- Laporan UTS Kontrol Proses Piping and Instrument Drawing Heating CoolingDokumen11 halamanLaporan UTS Kontrol Proses Piping and Instrument Drawing Heating CoolingYas marizBelum ada peringkat
- Materi Sistem KontrolDokumen13 halamanMateri Sistem KontrolFakhri Satya NBelum ada peringkat
- Elemen Pengendalian ProsesDokumen6 halamanElemen Pengendalian ProsesShendy ArsellaBelum ada peringkat
- Sistem Kendali Manual Dan OtomtasiDokumen13 halamanSistem Kendali Manual Dan OtomtasiAyat Kursi75% (4)
- Perencanaan Sistem Pengendalian Proses Kelompok 2Dokumen18 halamanPerencanaan Sistem Pengendalian Proses Kelompok 2Dandy IrawanBelum ada peringkat
- Level Control-1 Kel 1Dokumen29 halamanLevel Control-1 Kel 1riki al biruni100% (1)
- BAB I PH ControlDokumen22 halamanBAB I PH ControlJoko Budiarto100% (1)
- Bab 1 Konsep Dasar InstrumentasiDokumen12 halamanBab 1 Konsep Dasar InstrumentasiIjall StreetBelum ada peringkat
- 05 Control System Application OKDokumen37 halaman05 Control System Application OKNyoman RakaBelum ada peringkat
- Sistem Kontrol Proses - 2bDokumen18 halamanSistem Kontrol Proses - 2bDevi SaharaniBelum ada peringkat
- Laporan Tetap PC13Dokumen21 halamanLaporan Tetap PC13ahmad abu bakarBelum ada peringkat
- Halaman AwalDokumen10 halamanHalaman AwalSemoga MembantuBelum ada peringkat
- 'Dokumen - Tips Tk451 Pengendalian Prose1Dokumen143 halaman'Dokumen - Tips Tk451 Pengendalian Prose1CarissadeantiBelum ada peringkat
- Laporan LEVEL KONTROLDokumen10 halamanLaporan LEVEL KONTROLfitriBelum ada peringkat
- Luvy Ap - 1141805002 Assignment 1 & 2Dokumen23 halamanLuvy Ap - 1141805002 Assignment 1 & 2Luvy AmanahBelum ada peringkat
- Laporan Pengendalian SuhuDokumen13 halamanLaporan Pengendalian SuhuDila AdilaBelum ada peringkat
- Level KontrolDokumen18 halamanLevel KontrolLintang NorfitriaBelum ada peringkat
- Kuliah PengaturanDokumen148 halamanKuliah PengaturanRechan Afranzia NugrahaBelum ada peringkat
- Laporan Level ControlDokumen21 halamanLaporan Level ControlRezki HandayaniBelum ada peringkat
- Sistem Manajemen Mutu (SMM) : TQ M (Total Q Uality Management)Dokumen23 halamanSistem Manajemen Mutu (SMM) : TQ M (Total Q Uality Management)m.kahfi ramadhanBelum ada peringkat
- Jurusan Teknik Kimia Politeknik Negeri SriwijayaDokumen12 halamanJurusan Teknik Kimia Politeknik Negeri Sriwijayam.kahfi ramadhanBelum ada peringkat
- Sistem Manajemen Mutu (SMM) : M. Kahfi Ramadhan Raina Khoirunisa Zain 5kidDokumen16 halamanSistem Manajemen Mutu (SMM) : M. Kahfi Ramadhan Raina Khoirunisa Zain 5kidm.kahfi ramadhanBelum ada peringkat
- Daftar KPDokumen1 halamanDaftar KPm.kahfi ramadhanBelum ada peringkat
- UntitledDokumen14 halamanUntitledm.kahfi ramadhanBelum ada peringkat
- Pengertian Blower, Fungsi Serta Bedanya Dengan Kipas AnginDokumen5 halamanPengertian Blower, Fungsi Serta Bedanya Dengan Kipas Anginm.kahfi ramadhanBelum ada peringkat
- UntitledDokumen3 halamanUntitledm.kahfi ramadhanBelum ada peringkat
- Pengolahan Air Utuk Umpa BoilerDokumen1 halamanPengolahan Air Utuk Umpa Boilerm.kahfi ramadhanBelum ada peringkat
- Sistem Manajemen Mutu (SMM) : Raina Khoirunisa Zain M. Kahfi Ramadhan 5kidDokumen13 halamanSistem Manajemen Mutu (SMM) : Raina Khoirunisa Zain M. Kahfi Ramadhan 5kidm.kahfi ramadhanBelum ada peringkat
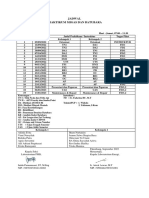
- Jadwal Praktikum Migas Dan BatubaraDokumen4 halamanJadwal Praktikum Migas Dan Batubaram.kahfi ramadhanBelum ada peringkat
- Pertannya Sistem Manajemen MutuDokumen1 halamanPertannya Sistem Manajemen Mutum.kahfi ramadhanBelum ada peringkat
- Pompa SentrifugalDokumen13 halamanPompa Sentrifugalm.kahfi ramadhanBelum ada peringkat
- Water TreatmentDokumen14 halamanWater Treatmentm.kahfi ramadhanBelum ada peringkat
- Pelanggaran EtikaDokumen6 halamanPelanggaran Etikam.kahfi ramadhanBelum ada peringkat
- GrafikDokumen1 halamanGrafikm.kahfi ramadhanBelum ada peringkat
- AndanuDokumen2 halamanAndanum.kahfi ramadhanBelum ada peringkat
- Proposal YougurtDokumen12 halamanProposal Yougurtm.kahfi ramadhanBelum ada peringkat
- Asetilasi Pembuatan AspirinDokumen12 halamanAsetilasi Pembuatan Aspirinm.kahfi ramadhanBelum ada peringkat
- FISIKADokumen7 halamanFISIKAm.kahfi ramadhanBelum ada peringkat
- Unikom - Ratisa y Dewi - 12. Bab 2Dokumen33 halamanUnikom - Ratisa y Dewi - 12. Bab 2m.kahfi ramadhanBelum ada peringkat
- M. Kahfi Ramadhan - Termo4Dokumen6 halamanM. Kahfi Ramadhan - Termo4m.kahfi ramadhanBelum ada peringkat
- Format Pilihan ORMAWA Kepengurusan 2022Dokumen2 halamanFormat Pilihan ORMAWA Kepengurusan 2022m.kahfi ramadhanBelum ada peringkat